کد آردوینو ماژول دات ماتریس MAX7219
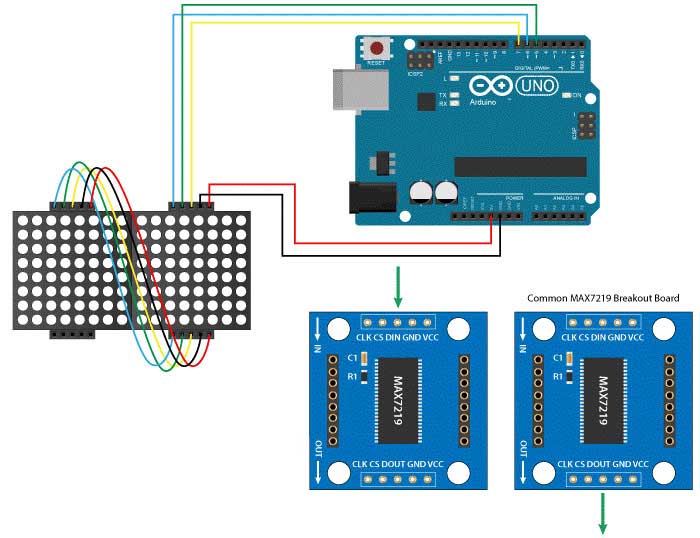
از کتابخانه MaxMatrix که امکان دانلود آن در GitHub وجود دارد برای راهاندازی ماژول استفاده شده است. بنابراین ابتدا کتابخانهی MaxMatrix.h فراخوانی شده، پینهایی را که ماژول به آن متصل است تعریف و سپس تعداد ماژولها و هدف MaxMatrix مشخص میشود.
توضیح برنامه: برای نمایش کاراکترها نیاز به تبدیل آنها به آرایهای از کاراکتر (Character Array) یا تعدادی بیت داریم. در دو تصویری که در این قسمت قرار داده شده، مثالی از تبدیل دو کاراکتر نشان داده شده است. همانطور که ملاحظه میکنید قرارگیری بیتهای 1 و 0 در کنار هم یک کاراکتر را تشکیل میدهد که 90 درجه چرخانده شده است. از تابع shiftLeft به منظور اسکرول کردن کاراکترها و چرخش 90 درجهای آنها استفاده میشود.
در بخش setup ماژول راهاندازی اولیه (initial) شده و میزان روشنایی LEDها تنظیم میشوند. در حلقه اصلی برنامه با استفاده از دستور ()setDot می توان هر LED را جداگانه در موقعیت X ، Y یا Row / Column روشن کرد و با استفاده از دستور ()clear صفحهی نمایش پاک میشود.
برای نمایش کاراکترهای از پیش تعریف شده از دستور ()writeSprite استفاده شده است که دو آرگومان اول (موقعیت X و Y) نشان دهندهی گوشه سمت چپ بالای کاراکتر است. در پایان با استفاده از دستور ()shiftLeft کاراکتر به سمت چپ حرکت داده میشود.
/*
8x8 LED Matrix MAX7219 Example 01
Based on the following library:
GitHub | riyas-org/max7219 https://github.com/riyas-org/max7219
*/
#include <MaxMatrix.h>
int DIN = 7; // DIN pin of MAX7219 module
int CLK = 6; // CLK pin of MAX7219 module
int CS = 5; // CS pin of MAX7219 module
int maxInUse = 1;
MaxMatrix m(DIN, CS, CLK, maxInUse);
char A[] = {4, 8,
B01111110,
B00010001,
B00010001,
B01111110,
};
char B[] = {4, 8,
B01111111,
B01001001,
B01001001,
B00110110,
};
char smile01[] = {8, 8,
B00111100,
B01000010,
B10010101,
B10100001,
B10100001,
B10010101,
B01000010,
B00111100
};
char smile02[] = {8, 8,
B00111100,
B01000010,
B10010101,
B10010001,
B10010001,
B10010101,
B01000010,
B00111100
};
char smile03[] = {8, 8,
B00111100,
B01000010,
B10100101,
B10010001,
B10010001,
B10100101,
B01000010,
B00111100
};
void setup() {
m.init(); // MAX7219 initialization
m.setIntensity(8); // initial led matrix intensity, 0-15
}
void loop() {
// Seting the LEDs On or Off at x,y or row,column position
m.setDot(6,2,true);
delay(1000);
m.setDot(6,3,true);
delay(1000);
m.clear(); // Clears the display
for (int i=0; i<8; i++){
m.setDot(i,i,true);
delay(300);
}
m.clear();
// Displaying the character at x,y (upper left corner of the character)
m.writeSprite(2, 0, A);
delay(1000);
m.writeSprite(2, 0, B);
delay(1000);
m.writeSprite(0, 0, smile01);
delay(1000);
m.writeSprite(0, 0, smile02);
delay(1000);
m.writeSprite(0, 0, smile03);
delay(1000);
for (int i=0; i<8; i++){
m.shiftLeft(false,false);
delay(300);
}
m.clear();
کد اسکرول کردن متن روی ماژول دات ماتریس 8×8
توضیح برنامه: در این کد یک کتابخانه اضافی برای PROGMEN که اصلاح کننده متغیر است فراخوانی شده که از آن برای ذخیره اطلاعات در حافظههای فلش به جای SRAM استفاده میشود. زمانی که تعداد زیادی رشته در حافظه فلش قرار بگیرد ، باعث اشغال شدن بخش زیاذی از فضای RAM میشود. در این حالت رشتهها باید از نوع FLASH یا PROGMEM تعریف شوند.
در مرحله بعد با یک آرایه کاراکتری متن مورد نظر تعریف و توسط دستور printStringWithShift نمایش داده میشود. در آرگومان دوم این تابع سرعت اسکرول شدن متن بر اساس مدت زمان پیمایش آن بر روی دات ماتریس بر حسب میلی ثانیه مشخص میشود.
/*
8x8 LED Matrix MAX7219 Scrolling Text Example
Based on the following library:
GitHub | riyas-org/max7219 https://github.com/riyas-org/max7219
*/
#include <MaxMatrix.h>
#include <avr/pgmspace.h>
PROGMEM const unsigned char CH[] = {
3, 8, B00000000, B00000000, B00000000, B00000000, B00000000, // space
1, 8, B01011111, B00000000, B00000000, B00000000, B00000000, // !
3, 8, B00000011, B00000000, B00000011, B00000000, B00000000, // "
5, 8, B00010100, B00111110, B00010100, B00111110, B00010100, // #
4, 8, B00100100, B01101010, B00101011, B00010010, B00000000, // $
5, 8, B01100011, B00010011, B00001000, B01100100, B01100011, // %
5, 8, B00110110, B01001001, B01010110, B00100000, B01010000, // &
1, 8, B00000011, B00000000, B00000000, B00000000, B00000000, // '
3, 8, B00011100, B00100010, B01000001, B00000000, B00000000, // (
3, 8, B01000001, B00100010, B00011100, B00000000, B00000000, // )
5, 8, B00101000, B00011000, B00001110, B00011000, B00101000, // *
5, 8, B00001000, B00001000, B00111110, B00001000, B00001000, // +
2, 8, B10110000, B01110000, B00000000, B00000000, B00000000, // ,
4, 8, B00001000, B00001000, B00001000, B00001000, B00000000, // -
2, 8, B01100000, B01100000, B00000000, B00000000, B00000000, // .
4, 8, B01100000, B00011000, B00000110, B00000001, B00000000, // /
4, 8, B00111110, B01000001, B01000001, B00111110, B00000000, // 0
3, 8, B01000010, B01111111, B01000000, B00000000, B00000000, // 1
4, 8, B01100010, B01010001, B01001001, B01000110, B00000000, // 2
4, 8, B00100010, B01000001, B01001001, B00110110, B00000000, // 3
4, 8, B00011000, B00010100, B00010010, B01111111, B00000000, // 4
4, 8, B00100111, B01000101, B01000101, B00111001, B00000000, // 5
4, 8, B00111110, B01001001, B01001001, B00110000, B00000000, // 6
4, 8, B01100001, B00010001, B00001001, B00000111, B00000000, // 7
4, 8, B00110110, B01001001, B01001001, B00110110, B00000000, // 8
4, 8, B00000110, B01001001, B01001001, B00111110, B00000000, // 9
2, 8, B01010000, B00000000, B00000000, B00000000, B00000000, // :
2, 8, B10000000, B01010000, B00000000, B00000000, B00000000, // ;
3, 8, B00010000, B00101000, B01000100, B00000000, B00000000, // <
3, 8, B00010100, B00010100, B00010100, B00000000, B00000000, // =
3, 8, B01000100, B00101000, B00010000, B00000000, B00000000, // >
4, 8, B00000010, B01011001, B00001001, B00000110, B00000000, // ?
5, 8, B00111110, B01001001, B01010101, B01011101, B00001110, // @
4, 8, B01111110, B00010001, B00010001, B01111110, B00000000, // A
4, 8, B01111111, B01001001, B01001001, B00110110, B00000000, // B
4, 8, B00111110, B01000001, B01000001, B00100010, B00000000, // C
4, 8, B01111111, B01000001, B01000001, B00111110, B00000000, // D
4, 8, B01111111, B01001001, B01001001, B01000001, B00000000, // E
4, 8, B01111111, B00001001, B00001001, B00000001, B00000000, // F
4, 8, B00111110, B01000001, B01001001, B01111010, B00000000, // G
4, 8, B01111111, B00001000, B00001000, B01111111, B00000000, // H
3, 8, B01000001, B01111111, B01000001, B00000000, B00000000, // I
4, 8, B00110000, B01000000, B01000001, B00111111, B00000000, // J
4, 8, B01111111, B00001000, B00010100, B01100011, B00000000, // K
4, 8, B01111111, B01000000, B01000000, B01000000, B00000000, // L
5, 8, B01111111, B00000010, B00001100, B00000010, B01111111, // M
5, 8, B01111111, B00000100, B00001000, B00010000, B01111111, // N
4, 8, B00111110, B01000001, B01000001, B00111110, B00000000, // O
4, 8, B01111111, B00001001, B00001001, B00000110, B00000000, // P
4, 8, B00111110, B01000001, B01000001, B10111110, B00000000, // Q
4, 8, B01111111, B00001001, B00001001, B01110110, B00000000, // R
4, 8, B01000110, B01001001, B01001001, B00110010, B00000000, // S
5, 8, B00000001, B00000001, B01111111, B00000001, B00000001, // T
4, 8, B00111111, B01000000, B01000000, B00111111, B00000000, // U
5, 8, B00001111, B00110000, B01000000, B00110000, B00001111, // V
5, 8, B00111111, B01000000, B00111000, B01000000, B00111111, // W
5, 8, B01100011, B00010100, B00001000, B00010100, B01100011, // X
5, 8, B00000111, B00001000, B01110000, B00001000, B00000111, // Y
4, 8, B01100001, B01010001, B01001001, B01000111, B00000000, // Z
2, 8, B01111111, B01000001, B00000000, B00000000, B00000000, // [
4, 8, B00000001, B00000110, B00011000, B01100000, B00000000, // \ backslash
2, 8, B01000001, B01111111, B00000000, B00000000, B00000000, // ]
3, 8, B00000010, B00000001, B00000010, B00000000, B00000000, // hat
4, 8, B01000000, B01000000, B01000000, B01000000, B00000000, // _
2, 8, B00000001, B00000010, B00000000, B00000000, B00000000, // `
4, 8, B00100000, B01010100, B01010100, B01111000, B00000000, // a
4, 8, B01111111, B01000100, B01000100, B00111000, B00000000, // b
4, 8, B00111000, B01000100, B01000100, B00101000, B00000000, // c
4, 8, B00111000, B01000100, B01000100, B01111111, B00000000, // d
4, 8, B00111000, B01010100, B01010100, B00011000, B00000000, // e
3, 8, B00000100, B01111110, B00000101, B00000000, B00000000, // f
4, 8, B10011000, B10100100, B10100100, B01111000, B00000000, // g
4, 8, B01111111, B00000100, B00000100, B01111000, B00000000, // h
3, 8, B01000100, B01111101, B01000000, B00000000, B00000000, // i
4, 8, B01000000, B10000000, B10000100, B01111101, B00000000, // j
4, 8, B01111111, B00010000, B00101000, B01000100, B00000000, // k
3, 8, B01000001, B01111111, B01000000, B00000000, B00000000, // l
5, 8, B01111100, B00000100, B01111100, B00000100, B01111000, // m
4, 8, B01111100, B00000100, B00000100, B01111000, B00000000, // n
4, 8, B00111000, B01000100, B01000100, B00111000, B00000000, // o
4, 8, B11111100, B00100100, B00100100, B00011000, B00000000, // p
4, 8, B00011000, B00100100, B00100100, B11111100, B00000000, // q
4, 8, B01111100, B00001000, B00000100, B00000100, B00000000, // r
4, 8, B01001000, B01010100, B01010100, B00100100, B00000000, // s
3, 8, B00000100, B00111111, B01000100, B00000000, B00000000, // t
4, 8, B00111100, B01000000, B01000000, B01111100, B00000000, // u
5, 8, B00011100, B00100000, B01000000, B00100000, B00011100, // v
5, 8, B00111100, B01000000, B00111100, B01000000, B00111100, // w
5, 8, B01000100, B00101000, B00010000, B00101000, B01000100, // x
4, 8, B10011100, B10100000, B10100000, B01111100, B00000000, // y
3, 8, B01100100, B01010100, B01001100, B00000000, B00000000, // z
3, 8, B00001000, B00110110, B01000001, B00000000, B00000000, // {
1, 8, B01111111, B00000000, B00000000, B00000000, B00000000, // |
3, 8, B01000001, B00110110, B00001000, B00000000, B00000000, // }
4, 8, B00001000, B00000100, B00001000, B00000100, B00000000, // ~
};
int DIN = 7; // DIN pin of MAX7219 module
int CLK = 6; // CLK pin of MAX7219 module
int CS = 5; // CS pin of MAX7219 module
int maxInUse = 2;
MaxMatrix m(DIN, CS, CLK, maxInUse);
byte buffer[10];
char text[]= "HowToMechatronics.com "; // Scrolling text
void setup() {
m.init(); // module initialize
m.setIntensity(15); // dot matix intensity 0-15
}
void loop() {
printStringWithShift(text, 100); // (text, scrolling speed)
}
// Display=the extracted characters with scrolling
void printCharWithShift(char c, int shift_speed) {
if (c < 32) return;
c -= 32;
memcpy_P(buffer, CH + 7 * c, 7);
m.writeSprite(32, 0, buffer);
m.setColumn(32 + buffer[0], 0);
for (int i = 0; i < buffer[0] + 1; i++)
{
delay(shift_speed);
m.shiftLeft(false, false);
}
}
// Extract the characters from the text string
void printStringWithShift(char* s, int shift_speed) {
while (*s != 0) {
printCharWithShift(*s, shift_speed);
s++;
}
}
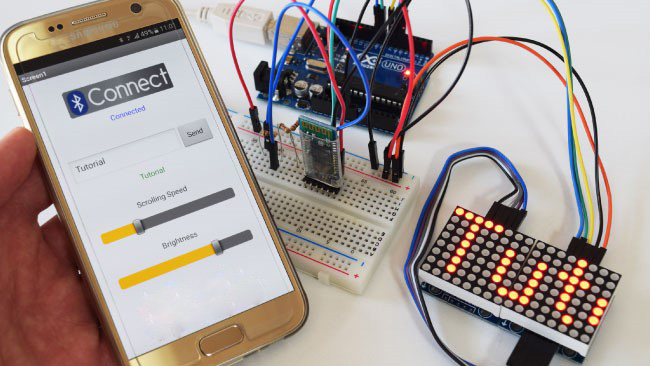
برنامه اندروید برای کنترل دات ماتریس از طریق بلوتوث
توضیح برنامه: در ابتدا کتابخانه SoftwareSerial.h برای ارتباط بلوتوث فعال فراخوانی شده و برخی از متغیرهای مورد نیاز تعریف میشوند. در بخش setup باودریت بلوتوث 38400 بیت در ثانیه تنظیم شده و پیام متنی اولیه با عنوان "Partineh.com" تعریف میشود. در حلقه اصلی برنامه با استفاده از دستور () Bluetooth.available وجود دادهها در پورت سریال بررسی شده، سپس با استفاده از تابع ()Bluetooth.read خواندن اطلاعات از پورت سریال شروع میشود. اولین بایت دریافتی همیشه در متغیر "indicator" ذخیره شده و مطابق با آن پیام متنی، سرعت اسکرول و روشنایی LEDها تغییر میکند.
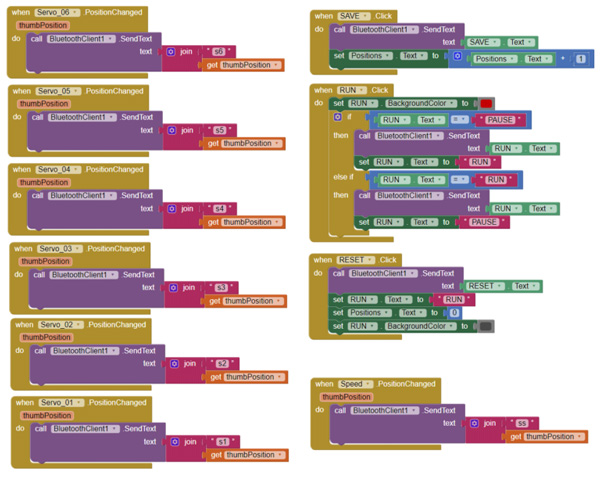
اگر نگاهی به بلوکهای کد برنامه اندرویدی بیندازیم متوجه شویم که با کلیک بر روی "Send" بایت نشانه که در این مورد "1" است ارسال میشود که به معنای تغییر پیام متنی است. برای انجام این کار ، در سمت آردوینو ، کل آرایه کاراکتر را پاک شده و همچنین صفحه نمایش ماتریس پاک میشود. سپس در حلقه while سایر دادهها از پورت سریال خوانده میشوند. بایت نشانه "2" به معنای تغییر در سرعت اسکرول شدن متن است. بنابراین مقدار جدید آن با استفاده از تابع ()Bluetooth.readString خوانده شده و سرعت اسکرول تنظیم میشود. به همین روش نیز روشنایی LED ها تنظیم می شوند.
در این قسمت می توانید اپلیکیشن اندروید مخصوص این پروژه را دانلود کنید.
/*
DIY Arduino Robot Arm Smartphone Control
*/
#include <SoftwareSerial.h>
#include <Servo.h>
Servo servo01;
Servo servo02;
Servo servo03;
Servo servo04;
Servo servo05;
Servo servo06;
SoftwareSerial Bluetooth(3, 4); // Arduino(RX, TX) - HC-05 Bluetooth (TX, RX)
int servo1Pos, servo2Pos, servo3Pos, servo4Pos, servo5Pos, servo6Pos; // current position
int servo1PPos, servo2PPos, servo3PPos, servo4PPos, servo5PPos, servo6PPos; // previous position
int servo01SP[50], servo02SP[50], servo03SP[50], servo04SP[50], servo05SP[50], servo06SP[50]; // for storing positions/steps
int speedDelay = 20;
int index = 0;
String dataIn = "";
void setup() {
servo01.attach(5);
servo02.attach(6);
servo03.attach(7);
servo04.attach(8);
servo05.attach(9);
servo06.attach(10);
Bluetooth.begin(38400); // Default baud rate of the Bluetooth module
Bluetooth.setTimeout(1);
delay(20);
// Robot arm initial position
servo1PPos = 90;
servo01.write(servo1PPos);
servo2PPos = 150;
servo02.write(servo2PPos);
servo3PPos = 35;
servo03.write(servo3PPos);
servo4PPos = 140;
servo04.write(servo4PPos);
servo5PPos = 85;
servo05.write(servo5PPos);
servo6PPos = 80;
servo06.write(servo6PPos);
}
void loop() {
// Check for incoming data
if (Bluetooth.available() > 0) {
dataIn = Bluetooth.readString(); // Read the data as string
// If "Waist" slider has changed value - Move Servo 1 to position
if (dataIn.startsWith("s1")) {
String dataInS = dataIn.substring(2, dataIn.length()); // Extract only the number. E.g. from "s1120" to "120"
servo1Pos = dataInS.toInt(); // Convert the string into integer
// We use for loops so we can control the speed of the servo
// If previous position is bigger then current position
if (servo1PPos > servo1Pos) {
for ( int j = servo1PPos; j >= servo1Pos; j--) { // Run servo down
servo01.write(j);
delay(20); // defines the speed at which the servo rotates
}
}
// If previous position is smaller then current position
if (servo1PPos < servo1Pos) {
for ( int j = servo1PPos; j <= servo1Pos; j++) { // Run servo up
servo01.write(j);
delay(20);
}
}
servo1PPos = servo1Pos; // set current position as previous position
}
// Move Servo 2
if (dataIn.startsWith("s2")) {
String dataInS = dataIn.substring(2, dataIn.length());
servo2Pos = dataInS.toInt();
if (servo2PPos > servo2Pos) {
for ( int j = servo2PPos; j >= servo2Pos; j--) {
servo02.write(j);
delay(50);
}
}
if (servo2PPos < servo2Pos) {
for ( int j = servo2PPos; j <= servo2Pos; j++) {
servo02.write(j);
delay(50);
}
}
servo2PPos = servo2Pos;
}
// Move Servo 3
if (dataIn.startsWith("s3")) {
String dataInS = dataIn.substring(2, dataIn.length());
servo3Pos = dataInS.toInt();
if (servo3PPos > servo3Pos) {
for ( int j = servo3PPos; j >= servo3Pos; j--) {
servo03.write(j);
delay(30);
}
}
if (servo3PPos < servo3Pos) {
for ( int j = servo3PPos; j <= servo3Pos; j++) {
servo03.write(j);
delay(30);
}
}
servo3PPos = servo3Pos;
}
// Move Servo 4
if (dataIn.startsWith("s4")) {
String dataInS = dataIn.substring(2, dataIn.length());
servo4Pos = dataInS.toInt();
if (servo4PPos > servo4Pos) {
for ( int j = servo4PPos; j >= servo4Pos; j--) {
servo04.write(j);
delay(30);
}
}
if (servo4PPos < servo4Pos) {
for ( int j = servo4PPos; j <= servo4Pos; j++) {
servo04.write(j);
delay(30);
}
}
servo4PPos = servo4Pos;
}
// Move Servo 5
if (dataIn.startsWith("s5")) {
String dataInS = dataIn.substring(2, dataIn.length());
servo5Pos = dataInS.toInt();
if (servo5PPos > servo5Pos) {
for ( int j = servo5PPos; j >= servo5Pos; j--) {
servo05.write(j);
delay(30);
}
}
if (servo5PPos < servo5Pos) {
for ( int j = servo5PPos; j <= servo5Pos; j++) {
servo05.write(j);
delay(30);
}
}
servo5PPos = servo5Pos;
}
// Move Servo 6
if (dataIn.startsWith("s6")) {
String dataInS = dataIn.substring(2, dataIn.length());
servo6Pos = dataInS.toInt();
if (servo6PPos > servo6Pos) {
for ( int j = servo6PPos; j >= servo6Pos; j--) {
servo06.write(j);
delay(30);
}
}
if (servo6PPos < servo6Pos) {
for ( int j = servo6PPos; j <= servo6Pos; j++) {
servo06.write(j);
delay(30);
}
}
servo6PPos = servo6Pos;
}
// If button "SAVE" is pressed
if (dataIn.startsWith("SAVE")) {
servo01SP[index] = servo1PPos; // save position into the array
servo02SP[index] = servo2PPos;
servo03SP[index] = servo3PPos;
servo04SP[index] = servo4PPos;
servo05SP[index] = servo5PPos;
servo06SP[index] = servo6PPos;
index++; // Increase the array index
}
// If button "RUN" is pressed
if (dataIn.startsWith("RUN")) {
runservo(); // Automatic mode - run the saved steps
}
// If button "RESET" is pressed
if ( dataIn == "RESET") {
memset(servo01SP, 0, sizeof(servo01SP)); // Clear the array data to 0
memset(servo02SP, 0, sizeof(servo02SP));
memset(servo03SP, 0, sizeof(servo03SP));
memset(servo04SP, 0, sizeof(servo04SP));
memset(servo05SP, 0, sizeof(servo05SP));
memset(servo06SP, 0, sizeof(servo06SP));
index = 0; // Index to 0
}
}
}
// Automatic mode custom function - run the saved steps
void runservo() {
while (dataIn != "RESET") { // Run the steps over and over again until "RESET" button is pressed
for (int i = 0; i <= index - 2; i++) { // Run through all steps(index)
if (Bluetooth.available() > 0) { // Check for incomding data
dataIn = Bluetooth.readString();
if ( dataIn == "PAUSE") { // If button "PAUSE" is pressed
while (dataIn != "RUN") { // Wait until "RUN" is pressed again
if (Bluetooth.available() > 0) {
dataIn = Bluetooth.readString();
if ( dataIn == "RESET") {
break;
}
}
}
}
// If speed slider is changed
if (dataIn.startsWith("ss")) {
String dataInS = dataIn.substring(2, dataIn.length());
speedDelay = dataInS.toInt(); // Change servo speed (delay time)
}
}
// Servo 1
if (servo01SP[i] == servo01SP[i + 1]) {
}
if (servo01SP[i] > servo01SP[i + 1]) {
for ( int j = servo01SP[i]; j >= servo01SP[i + 1]; j--) {
servo01.write(j);
delay(speedDelay);
}
}
if (servo01SP[i] < servo01SP[i + 1]) {
for ( int j = servo01SP[i]; j <= servo01SP[i + 1]; j++) {
servo01.write(j);
delay(speedDelay);
}
}
// Servo 2
if (servo02SP[i] == servo02SP[i + 1]) {
}
if (servo02SP[i] > servo02SP[i + 1]) {
for ( int j = servo02SP[i]; j >= servo02SP[i + 1]; j--) {
servo02.write(j);
delay(speedDelay);
}
}
if (servo02SP[i] < servo02SP[i + 1]) {
for ( int j = servo02SP[i]; j <= servo02SP[i + 1]; j++) {
servo02.write(j);
delay(speedDelay);
}
}
// Servo 3
if (servo03SP[i] == servo03SP[i + 1]) {
}
if (servo03SP[i] > servo03SP[i + 1]) {
for ( int j = servo03SP[i]; j >= servo03SP[i + 1]; j--) {
servo03.write(j);
delay(speedDelay);
}
}
if (servo03SP[i] < servo03SP[i + 1]) {
for ( int j = servo03SP[i]; j <= servo03SP[i + 1]; j++) {
servo03.write(j);
delay(speedDelay);
}
}
// Servo 4
if (servo04SP[i] == servo04SP[i + 1]) {
}
if (servo04SP[i] > servo04SP[i + 1]) {
for ( int j = servo04SP[i]; j >= servo04SP[i + 1]; j--) {
servo04.write(j);
delay(speedDelay);
}
}
if (servo04SP[i] < servo04SP[i + 1]) {
for ( int j = servo04SP[i]; j <= servo04SP[i + 1]; j++) {
servo04.write(j);
delay(speedDelay);
}
}
// Servo 5
if (servo05SP[i] == servo05SP[i + 1]) {
}
if (servo05SP[i] > servo05SP[i + 1]) {
for ( int j = servo05SP[i]; j >= servo05SP[i + 1]; j--) {
servo05.write(j);
delay(speedDelay);
}
}
if (servo05SP[i] < servo05SP[i + 1]) {
for ( int j = servo05SP[i]; j <= servo05SP[i + 1]; j++) {
servo05.write(j);
delay(speedDelay);
}
}
// Servo 6
if (servo06SP[i] == servo06SP[i + 1]) {
}
if (servo06SP[i] > servo06SP[i + 1]) {
for ( int j = servo06SP[i]; j >= servo06SP[i + 1]; j--) {
servo06.write(j);
delay(speedDelay);
}
}
if (servo06SP[i] < servo06SP[i + 1]) {
for ( int j = servo06SP[i]; j <= servo06SP[i + 1]; j++) {
servo06.write(j);
delay(speedDelay);
}
}
}
}
}