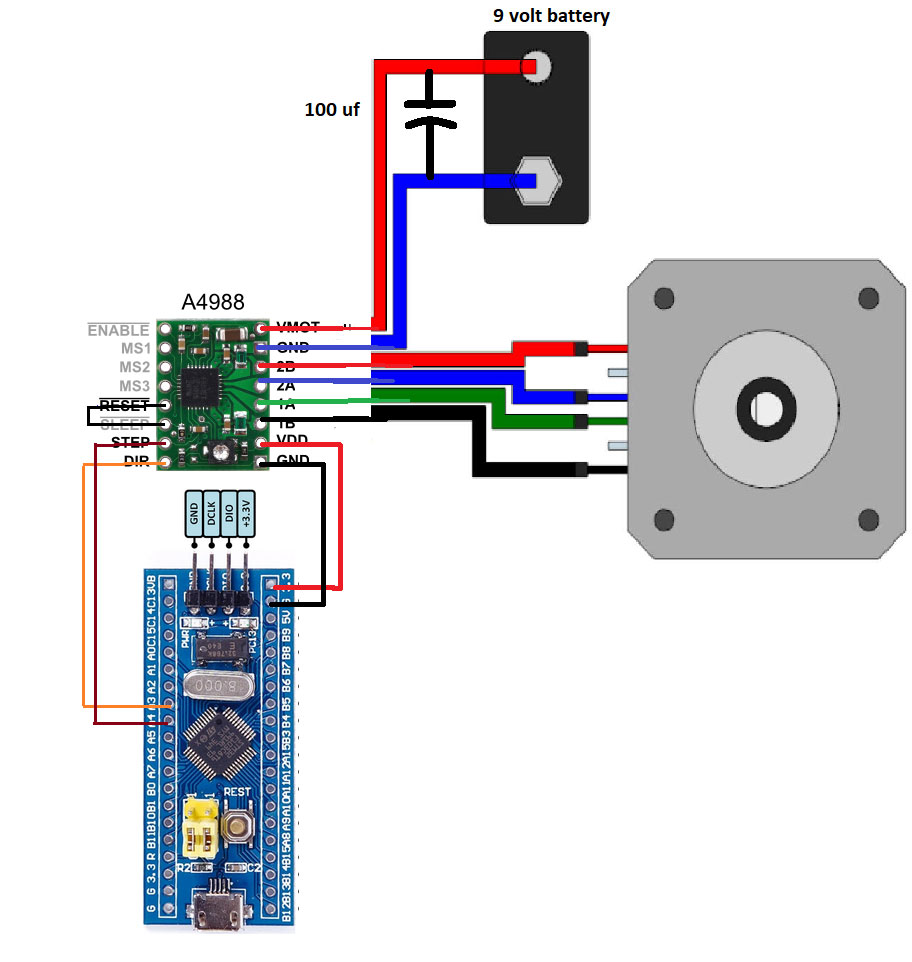
کد پروژه در کامپایلر Keil تنظیم شده است. برای تنظیمات اولیه نوسانساز و رجیسترها از واسط گرافیکی Stm32cubemx استفاده شده است. دو پین از پورت A میکروکنترلر به عنوان خروجی جهت کنترل پینهای Step و Direction درایور نیز در گرفته شدهاند.
در حلقه اصلی برنامه پین Direction به منظور چرخش موتور در جهت ساعتگرد High میشود. سپس به منظور چرخش یک دور کامل 360 درجه در حلقه for 200 گام طی میشود.
HAL_GPIO_WritePin(GPIOA, DIR_Pin, GPIO_PIN_SET);//Clock wise rotation
سپس جهت چرخش عوض شده و مجددا موتور 200 گام به عقب و به نقطهی اولیه برمیگردد.
#include "main.h"
#include "stm32f1xx_hal.h"
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
int main(void)
{
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* Infinite loop */
while (1)
{
HAL_GPIO_WritePin(GPIOA, DIR_Pin, GPIO_PIN_SET);//Clock wise rotation
for(int i=1;i<=200;i++){ //Moving stepper motor forward
HAL_GPIO_WritePin(GPIOA, STEP_Pin, GPIO_PIN_SET);
HAL_Delay(50);
HAL_GPIO_WritePin(GPIOA, STEP_Pin, GPIO_PIN_RESET);
HAL_Delay(50);
}
HAL_GPIO_WritePin(GPIOA, DIR_Pin, GPIO_PIN_RESET);//Anti clock wise rotation
for(int j=1;j<=200;j++){ //Moving stepper motor forward
HAL_GPIO_WritePin(GPIOA, STEP_Pin, GPIO_PIN_SET);
HAL_Delay(50);
HAL_GPIO_WritePin(GPIOA, STEP_Pin, GPIO_PIN_RESET);
HAL_Delay(50);
}
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = 16;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, DIR_Pin|STEP_Pin, GPIO_PIN_RESET);
/*Configure GPIO pins : DIR_Pin STEP_Pin */
GPIO_InitStruct.Pin = DIR_Pin|STEP_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
void _Error_Handler(char *file, int line)
{
while(1)
{
}
}
#ifdef USE_FULL_ASSERT
#endif /* USE_FULL_ASSERT */