در این پروژه از کتابخانه MPU6050 برای ارتباط ماژول با آردوینو استفاده شده است. بنابراین در ابتدا باید کتابخانه ماژول MPU6050 را از GitHub دانلود کرده و در کامپایلر آردوینو IDE نصب کنیم
گام اول: در این مرحله کتابخانههای مورد نیاز از جمله کتابخانهی مربوط به ماژول (MPU6050) ،کتابخانه نمایشگر (LCD) و کتابخانه ارتباط سریال (wire) را فراخوانی میکنیم.
#include<LiquidCrystal.h>
LiquidCrystal lcd(8,9,10,11,12,13);
#include <Wire.h>
#include <MPU6050.h>
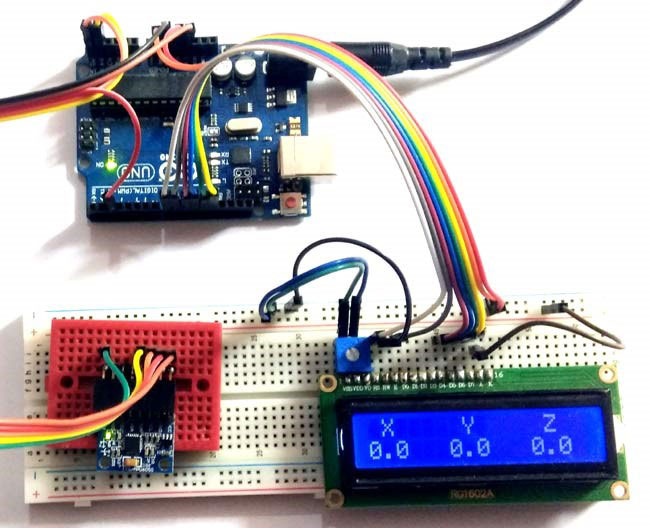
در قسمت تنظیمات برنامه، تمامی قطعات را اندازی اولیه کرده و وضعیت سنسور را توسط نمایشگر نشان میدهیم.
void setup()
{
lcd.begin(16,2);
lcd.createChar(0, degree);
Serial.begin(9600);
Serial.println("Initialize MPU6050");
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
lcd.clear();
lcd.print("Device not Found");
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
count=0;
mpu.calibrateGyro();
mpu.setThreshold(3);
در حلقه اصلی برنامه توابعی را برای نمایش دما ، سرعت زاویهای و شتاب بر روی نمایشگر هر 10 ثانیه فراخوانی میکنیم.
این سه تابع عبارتند از: tempShow ، gyroShow و accelShow
void loop()
{
lcd.clear();
lcd.print("Temperature");
long st=millis();
Serial.println("Temperature");
while(millis()<st+period)
{
lcd.setCursor(0,1);
tempShow();
}
lcd.clear();
lcd.print("Gyro");
delay(2000);
st=millis();
Serial.println("Gyro");
while(millis()<st+period)
{
lcd.setCursor(0,1);
gyroShow();
}
lcd.clear();
lcd.print("Accelerometer");
delay(2000);
st=millis();
کد کامل برنامه:
#include<LiquidCrystal.h>
LiquidCrystal lcd(8,9,10,11,12,13);
#include <Wire.h>
#include <MPU6050.h>
#define period 10000
MPU6050 mpu;
int count=0;
char okFlag=0;
byte degree[8] = {
0b00000,
0b00110,
0b01111,
0b00110,
0b00000,
0b00000,
0b00000,
0b00000
};
void setup()
{
lcd.begin(16,2);
lcd.createChar(0, degree);
Serial.begin(9600);
Serial.println("Initialize MPU6050");
while(!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G))
{
lcd.clear();
lcd.print("Device not Found");
Serial.println("Could not find a valid MPU6050 sensor, check wiring!");
delay(500);
}
count=0;
mpu.calibrateGyro();
mpu.setThreshold(3);
lcd.clear();
lcd.print("MPU6050 Interface");
lcd.setCursor(0,1);
lcd.print(" Circuit Digest");
delay(2000);
lcd.clear();
}
void loop()
{
lcd.clear();
lcd.print("Temperature");
long st=millis();
Serial.println("Temperature");
while(millis()<st+period)
{
lcd.setCursor(0,1);
tempShow();
}
lcd.clear();
lcd.print("Gyro");
delay(2000);
st=millis();
Serial.println("Gyro");
while(millis()<st+period)
{
lcd.setCursor(0,1);
gyroShow();
}
lcd.clear();
lcd.print("Accelerometer");
delay(2000);
st=millis();
Serial.println("Accelerometer");
while(millis()<st+period)
{
lcd.setCursor(0,1);
accelShow();
}
}
void tempShow()
{
float temp = mpu.readTemperature();
Serial.print(" Temp = ");
Serial.print(temp);
Serial.println(" *C");
lcd.clear();
lcd.print("Temperature");
lcd.setCursor(0,1);
lcd.print(temp);
lcd.write((byte)0);
lcd.print("C");
delay(400);
}
void gyroShow()
{
//lcd.setCursor(0,0);
lcd.clear();
lcd.print(" X Y Z");
Vector rawGyro = mpu.readRawGyro();
Vector normGyro = mpu.readNormalizeGyro();
lcd.setCursor(0,1);
lcd.print(normGyro.XAxis,1);
lcd.setCursor(6,1);
lcd.print(normGyro.YAxis,1);
lcd.setCursor(12,1);
lcd.print(normGyro.ZAxis,1);
Serial.print(" Xnorm = ");
Serial.print(normGyro.XAxis);
Serial.print(" Ynorm = ");
Serial.print(normGyro.YAxis);
Serial.print(" Znorm = ");
Serial.println(normGyro.ZAxis);
delay(200);
}
void accelShow()
{
// lcd.setCursor(0,0);
lcd.clear();
lcd.print(" X Y Z");
Vector rawAccel = mpu.readRawAccel();
Vector normAccel = mpu.readNormalizeAccel();
lcd.setCursor(0,1);
lcd.print(normAccel.XAxis,1);
lcd.setCursor(6,1);
lcd.print(normAccel.YAxis,1);
lcd.setCursor(12,1);
lcd.print(normAccel.ZAxis,1);
Serial.print(" Xnorm = ");
Serial.print(normAccel.XAxis);
Serial.print(" Ynorm = ");
Serial.print(normAccel.YAxis);
Serial.print(" Znorm = ");
Serial.println(normAccel.ZAxis);
delay(200);
}