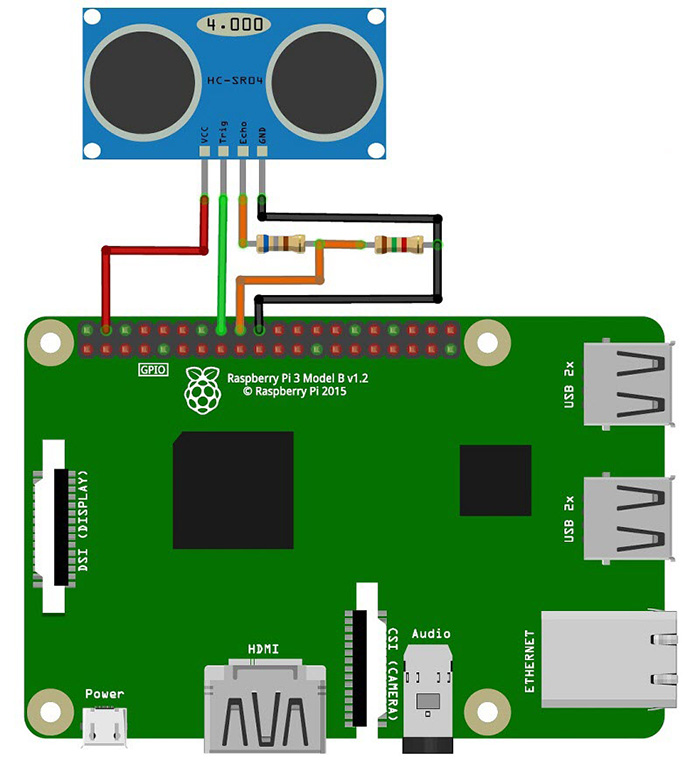
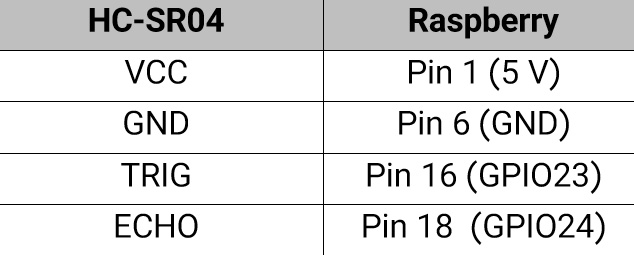
یکی از مواردی که هنگام سیمبندی رزبری پای و ماژول باید در نظر گرفته شوند استفاده از مدار مقسم ولتاژ روی پین Echo ماژول به منظور کاهش سطح ولتاژ اعمالی به رزبری پای توسط ماژول است. مقادیر مقاومتهایی که جهت رسیدن به ولتاژ مطلوب 680 اهم و 1.5 کیلواهم است. در صورت اتصال مستقیم پایهی ECHO به رزبری پای ولتاژ 5 ولت به پین GPIO وارد شده و باعث آسیب رسیدن به آن میشود.
