




یک ماژول زیگبی میتواند به عنوان یک هماهنگکننده (Coordinator) ، مسیریاب (Router) یا پایانافزار (End Device) عمل کند. برای کار در حالت دلخواه نیز باید تنظیماتی روی آن اعمال شود. بنابراین قبل از استفاده از ماژولهای زیگبی به رزبری پای باید این ماژول توسط نرمافزار XCTU تنظیم شود. نرمافزار XCTU یک نرمافزار چند منظوره برای ارتباط با ماژولهای شرکت دیجی (Digi RF modules) میباشد. با استفاده از این نرمافزار میتوان با ماژولهای زیگبی این شرکت توسط کامپیوتر ارتباط برقرار کرده و علاوه بر انجام تنظیمات، با ماژول ارتباط سریال برقرار کرد و آن را تست کرد.
تنظیم ماژول زیگبی توسط XCTU
برای اتصال ماژول به کامپیوتر از مبدل USB به سریال FT232 استفاده میشود. نرمافزار XCTU را از این لینک دانلود و نصب کنید. پس از دانلود و نصب، آن را باز کرده و از اتصال صحیح ماژول به لپتاپ یا کامپیوتر مطمئن شوید.
گام اول: بر روی گزینه search کلیک کنید. در این مرحله تمامی دستگاههای RF متصل شده به لپ تاپ شناسایی میشوند که در اینجا باید یک ماژول XBee شناسایی شود.
گام دوم: پورت سریالی که ماژول به آن متصل شده است انتخاب کرده و بر روی Next کلیک کنید.
گام سوم: در این گام، پارامترهای مربوط به پورت USB را مطابق شکل تنظیم کرده و بر روی Finish کلیک کنید.
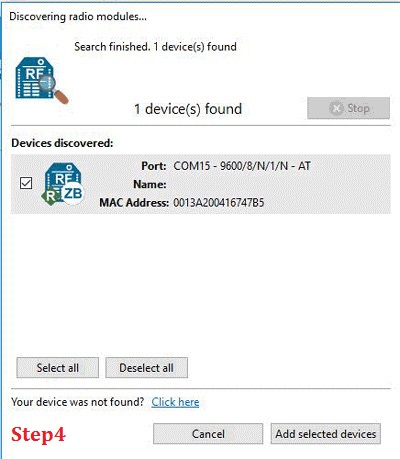
گام چهارم: دستگاه شناسایی شده را انتخاب کرده و روی گزینه Add selected device کلیک کنید. با این کار ماژول XBee به پنل XCTU اضافه میشود.
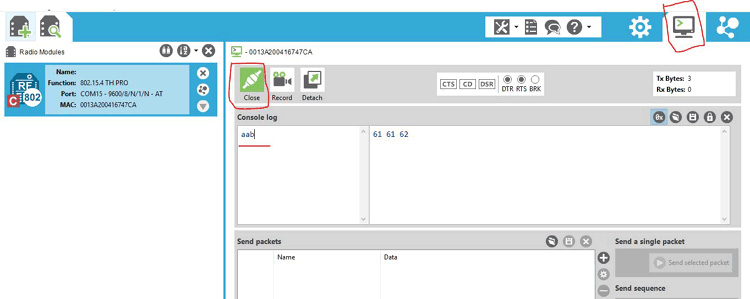
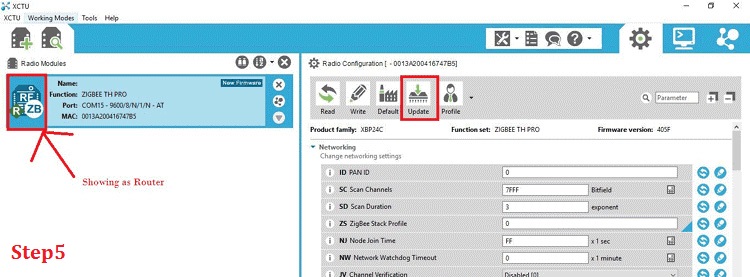
گام پنجم: در این گام باید تنظیمات لازم را بر روی ماژول XBee پیاده کنید. برای این کار میتوانید از دستورات AT استفاده کنید یا دادهها را به صورت دستی وارد نمایید. همانطور که در تصویر مشاهده میکنید، حرف R که در مشخصات ماژول در سمت چپ نرمافزار مشاهده میشود، به معنی قرار دادن Xbee در حالت مسیریاب (Router) است. در این پروژه ماژول را برای قسمت فرستنده در حالت هماهنگکننده (Coordinator) قرار میدهیم.
گام ششم: در این مرحله به منظور ارتباط با سایر ماژول های XBee ، باید دادههای ID ، MY و DL را تنظیم کنید. شناسه (ID) برای تمامی ماژولهای متصل به هم یکسان است. تنها پارامترهای MY و DL تغییر میکنند. به عبارت دیگر پارامتر MY برای گیرنده XBee تبدیل به DL و برای ماژول فرستنده (coordinator) تبدیل به MY میشود. پارامتر CE در حالت هماهنگکننده (coordinator) تنظیم کرده و روی گزینه Write کلیک کنید.
گام هفتم: بعد ازتنظیم داده های فوق در قسمت فرستنده ، ماژول زیگبی اول را جدا کرده و دومین ماژول زیگبی را متصل کنید. همان فرآیند قبلی را تکرار کنید. تنها تغییراتی که ذکر شد را برای DL ، MYو CE انجام دهید. دومین زیگبی باید به عنوان دستگاه پایانافزار (End Device) تنظیم شود.. بنابراین در منوی CE ،End Device را انتخاب کرده و بر روی Write کلیک کنید.
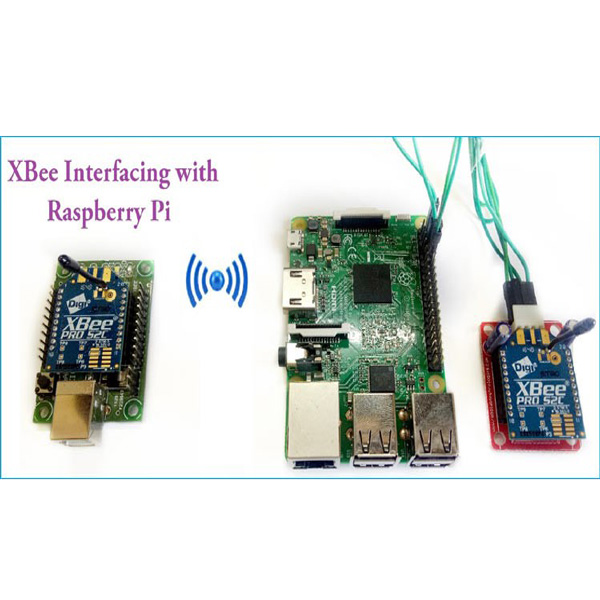
گام هشتم: در این مرحله ماژولهای زیگبی آماده هستند تا با رزبری پای ارتباط برقرار کنند. فرستنده زیگبی به لپتاپ و گیرنده زیگبی به رزبری پای متصل می شود. سپس با استفاده از لپ تاپ دستوراتی به قسمت گیرنده ارسال میشوند.