سنسوری که برای auto-leveling استفاده میشود، در واقع جایگزین Z-Endstop پرینترهای سه بعدی در برد کنترلی RAMPS1.4 میشود و دیگر نیازی به آن نیست. زیرا سنسور در هر لحظه به دنبال موقعیت هیت بد برای تغییر محل محور z است. اطمینان حاصل کنید که سنسور شما قابلیت تشخیص حداقل 4 میلیمتر فاصله را داشته باشد. در واقع بسته به ساختار سنسور ممکن است این مقدار کمتر از 4 میلیمتر باشد.
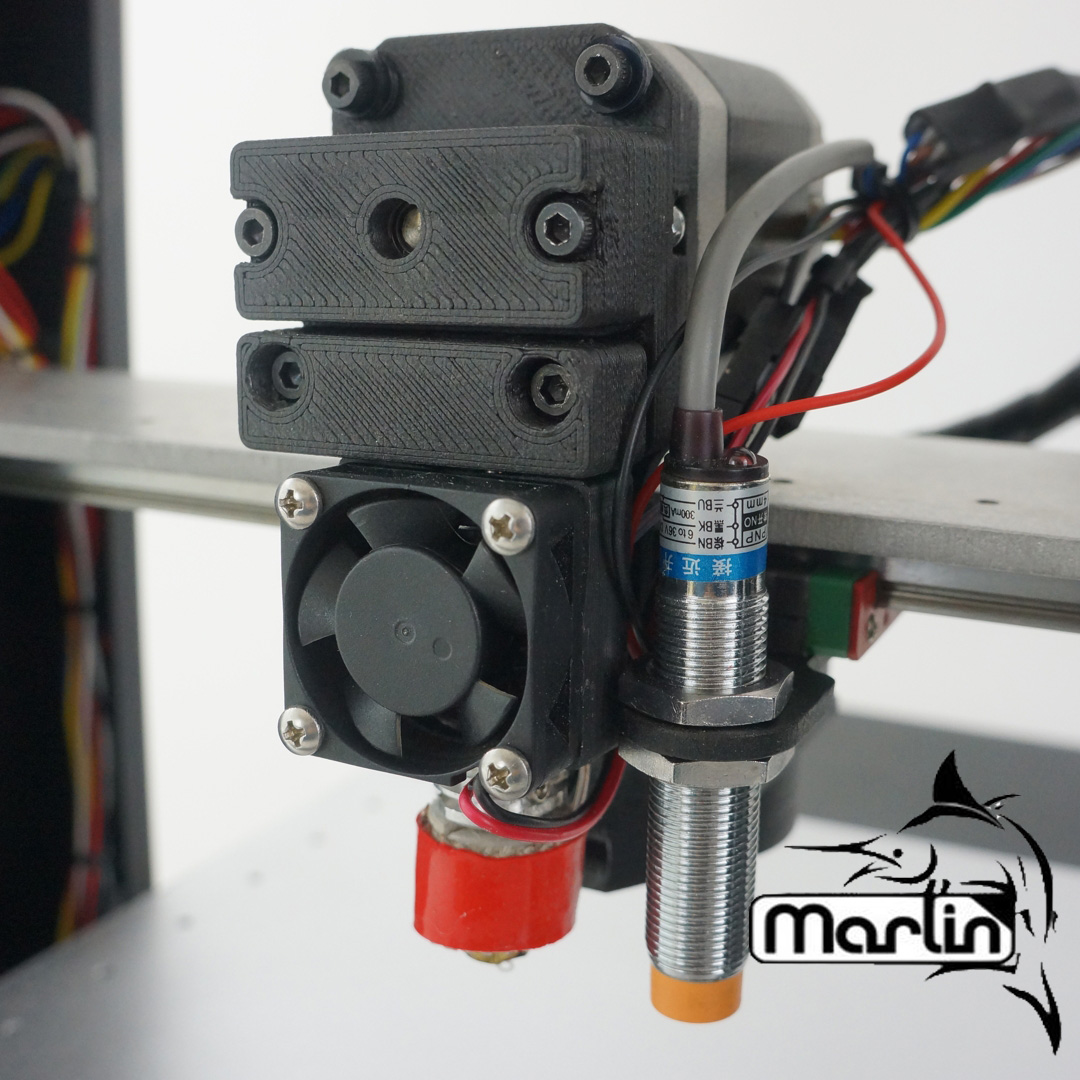
سنسور باید به گونهای نصب شود که نزدیک نازل بوده و قادر باشد به گوشههای بد پرینتر دست پیدا کند. سنسوری که در این جا مورد استفاده قرار گرفته مدل LJ12A3-4-Z/BY با یک نشانگر LED است که به هنگام فعالشدن این نشانگر روشن میشود.
شیوه اتصال اتصال سنسور مجاورت القایی
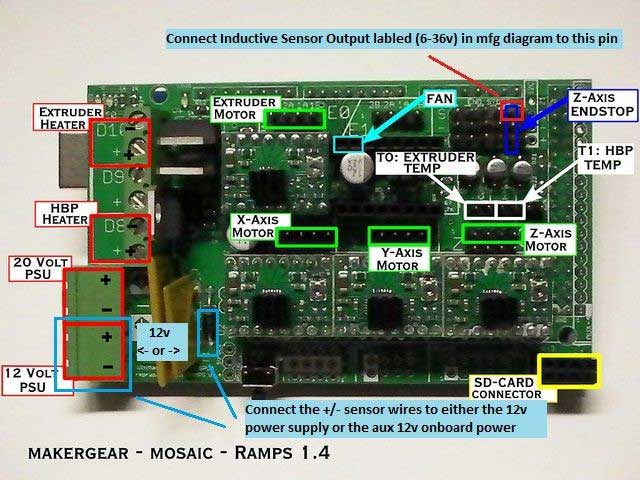
1) محل اتصال سنسور را که Z-Endstop است، بر روی برد کنترلر RAMPS پیدا کنید.
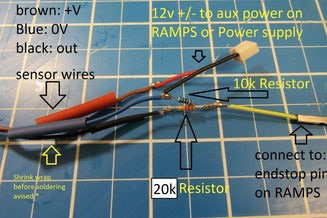
2) سیم سیگنال را (سیم مشکی رنگ که در تصویر بالا مشاهده میکنید) به ورودی سیگنال متصل کنید. در برد کنترلر RAMPS این پین نزدیک به قسمت بیرونی پینهای Endstop قرار دارد.
3) دو سیم دیگر را که با علامتهای + و – برچسبگذاری شدهاند، به تغذیه 12 ولت کمکی موجود بر کنترلر متصل کنید.
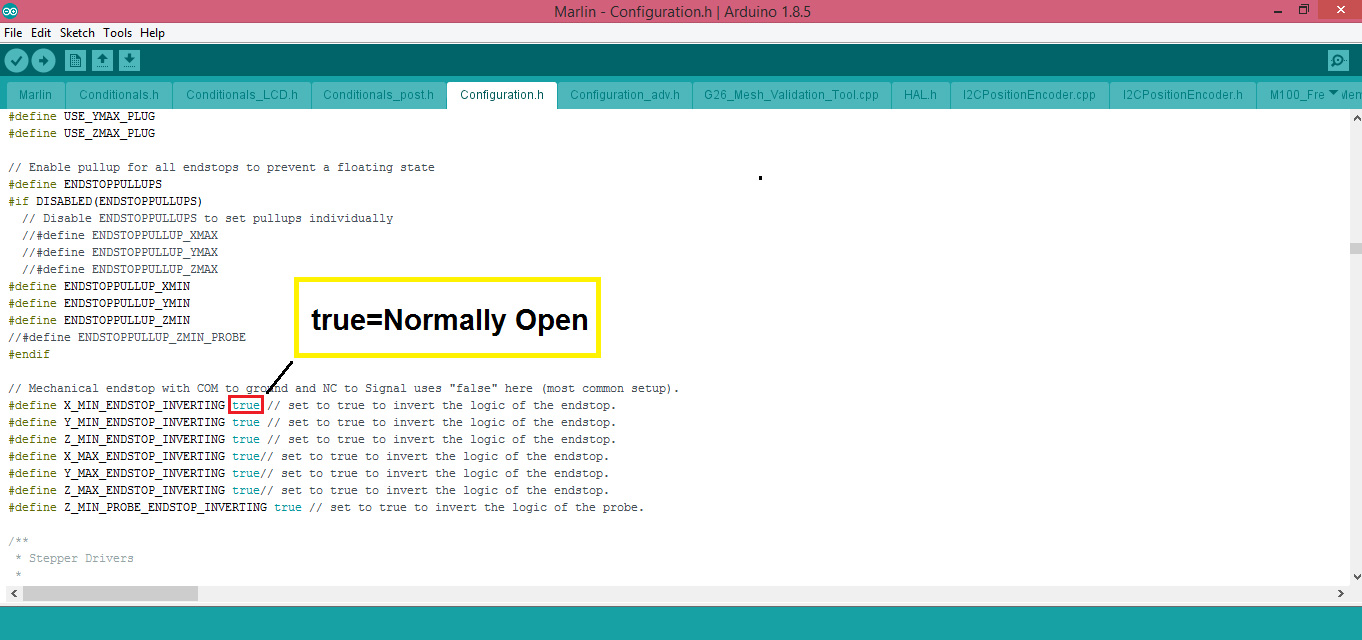
4) سنسور معرفی شده در اینجا جزو سوئیچ های "نرمال باز" است. به این معنا که سیگنال جریان از جانب آنها تنها هنگام فعالشدن به کنترلر ارسال میشود. شاید لازم باشد عبارت Z_MIN_ENDSTOP_INVERTING را در فریمور مارلین بررسی کنید.
5) سنسور را روی برخی از فلزات از جمله آلومینیوم ، مس و غیره آزمایش کنید. نشانگر LED آن در هنگام مجاورت با این مواد باید روشن شود. به منظور تستنهایی، کافی است تغذیه پرینتر را قطع کرده و محور z را به صورت دستی تا ارتفاعی مطمئن حرکت داده و بعد از آن سنسور مجاورت القایی را به صورت دستی در بالای بد پرینتر فعال کنید. اگر سنسور مانند یک میکروسوئیچ معمولی به درستی عمل کرد، نوبت به اعمال تنظیمات لازم در فریمور مارلین میرسد.