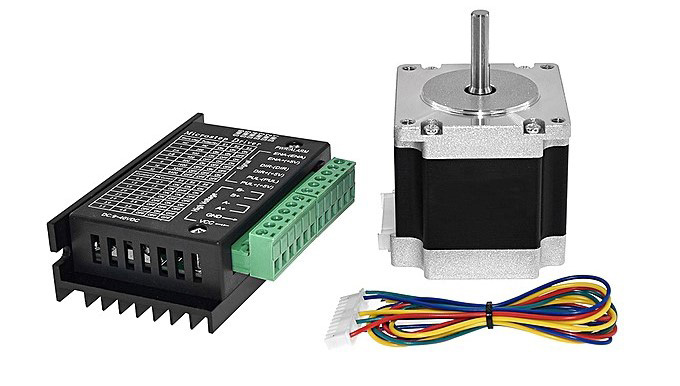
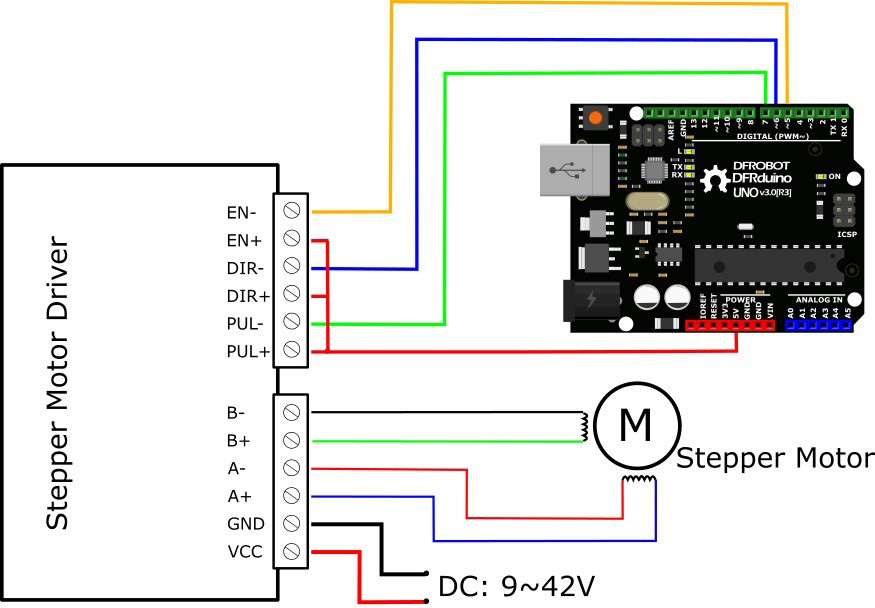
شیوهی اتصال درایور و آردوینو در دیاگرام مشخص شده است. این درایور قادر است استپر موتورهای دو قطبی تا ولتاژ 35 ولت و جریان 3/5 آمپر را راهاندازی کند. مطابق با این میزان جریان مصرفی درایور و همچنین در نظر گرفتن جریان مصرفی استپر موتور در هر فاز، از یک منبع تغذیهی 24 ولت 5 آمپر استفاده شده است.
+ PIN 5 ………………………………………………. EN
+ PIN 6 ………………………………………………. DIR
+ PIN 7 …………………………………..………….. PUL
-GND ………………………………………………. EN-/DIR-/PUL
این درایور قادر است استپر موتورهای دوقطبی تا ولتاژ 35 ولت و جریان 4 آمپر را راهاندازی کند. مطابق با این میزان جریان مصرفی درایور و همچنین در نظر گرفتن جریان مصرفی استپر موتور در هر فاز، از یک منبع تغذیهی 24 ولت 5 آمپر استفاده شده است.