به منظور تجسم بهتر نحوهی کنترل حرکت استپرموتور، از هیچ کتابخانهای در روند کد نویسی استفاده نشده است و توسط خاموش و روشن کردن پین Step درایور و ایجاد تاخیر ، موقعیت و سرعت استپر کنترل میشوند.
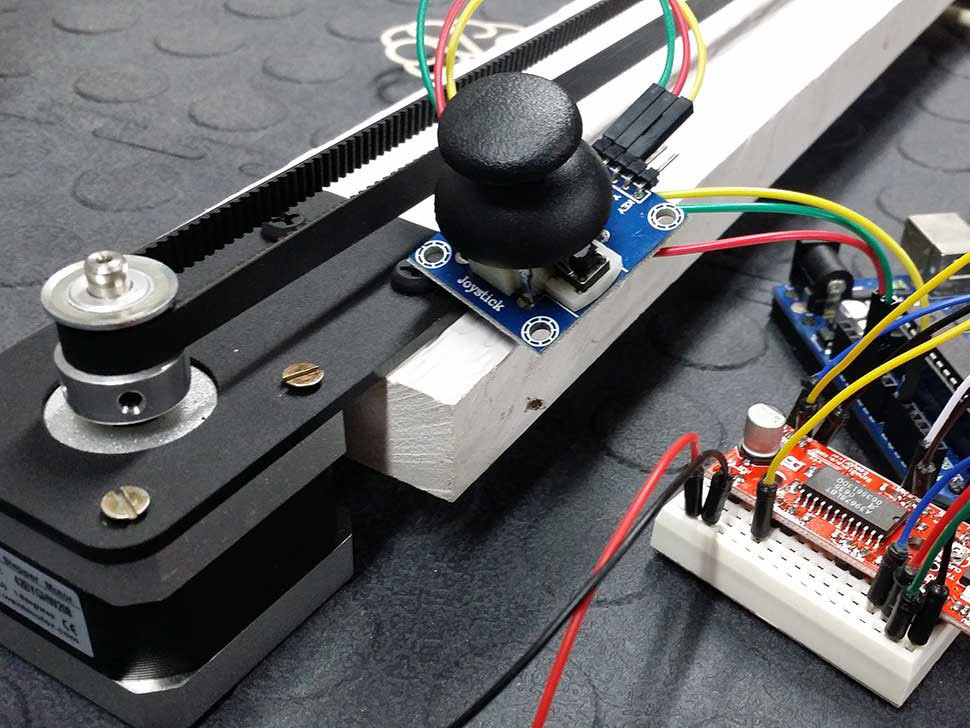
به دلیل عدم استفاده از میکروسوئیچ، در روند کدنویسی فرض شده است که در ابتدای حرکت، گیره تسمه در موقعیت میانی قرار داده شده است. بر اساس محاسبات انجام شده، به صورت تقریبی 25/10 چرخش کامل استپر موتور برای طی کردن فاصلهی بین موتور و پولی لازم است. اگر اسپر در حالت گام کامل 200 گام برای طی کردن یک دور بر دارد، آنگاه 2050 گام نیز برای طی کردن کل کورس لازم است. برای درک بیشتر فیلم آموزشی قرار داده شده را مشاهده کنید.
برنامه زیر را در آردوینو بارگذاری کنید.
/*
Partineh
Arduino Tutorial Series
Author: Shokoufeh Davarzani
Website: www.Partineh.com
*/
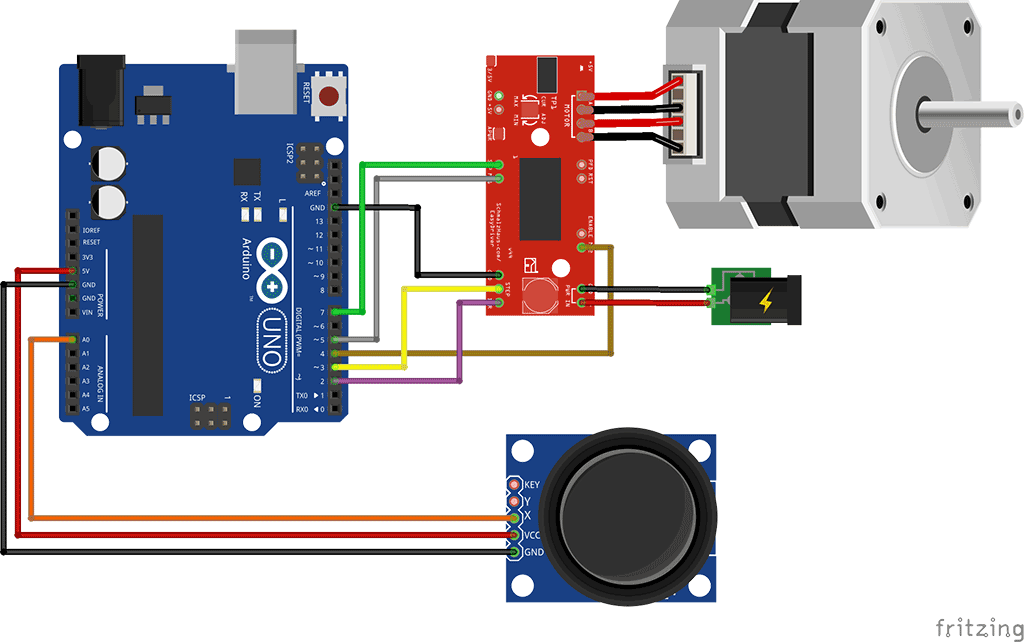
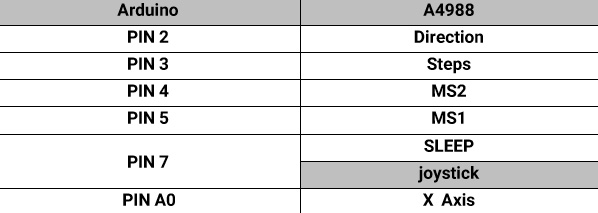
#define step_pin 3 // Pin 3 connected to Steps pin on EasyDriver
#define dir_pin 2 // Pin 2 connected to Direction pin
#define MS1 5 // Pin 5 connected to MS1 pin
#define MS2 4 // Pin 4 connected to MS2 pin
#define SLEEP 7 // Pin 7 connected to SLEEP pin
#define X_pin A0 // Pin A0 connected to joystick x axis
int direction; // Variable to set Rotation (CW-CCW) of the motor
int steps = 1025; // Assumes the belt clip is in the Middle
void setup() {
pinMode(MS1, OUTPUT);
pinMode(MS2, OUTPUT);
pinMode(dir_pin, OUTPUT);
pinMode(step_pin, OUTPUT);
pinMode(SLEEP, OUTPUT);
digitalWrite(SLEEP, HIGH); // Wake up EasyDriver
delay(5); // Wait for EasyDriver wake up
/* Configure type of Steps on EasyDriver:
// MS1 MS2
//
// LOW LOW = Full Step //
// HIGH LOW = Half Step //
// LOW HIGH = A quarter of Step //
// HIGH HIGH = An eighth of Step //
*/
digitalWrite(MS1, LOW); // Configures to Full Steps
digitalWrite(MS2, LOW); // Configures to Full Steps
}
void loop() {
while (analogRead(X_pin) >= 0 && analogRead(X_pin) <= 100) {
if (steps > 0) {
digitalWrite(dir_pin, HIGH); // (HIGH = anti-clockwise / LOW = clockwise)
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
steps--;
}
}
while (analogRead(X_pin) > 100 && analogRead(X_pin) <= 400) {
if (steps < 512) {
digitalWrite(dir_pin, LOW); // (HIGH = anti-clockwise / LOW = clockwise)
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
steps++;
}
if (steps > 512) {
digitalWrite(dir_pin, HIGH);
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
steps--;
}
}
while (analogRead(X_pin) > 401 && analogRead(X_pin) <= 600) {
if (steps < 1025) {
digitalWrite(dir_pin, LOW);
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
steps++;
}
if (steps > 1025) {
digitalWrite(dir_pin, HIGH);
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
steps--;
}
}
while (analogRead(X_pin) > 601 && analogRead(X_pin) <= 900) {
if (steps < 1535) {
digitalWrite(dir_pin, LOW);
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
steps++;
}
if (steps > 1535) {
digitalWrite(dir_pin, HIGH);
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
steps--;
}
}
while (analogRead(X_pin) > 900 && analogRead(X_pin) <= 1024) {
if (steps < 2050) {
digitalWrite(dir_pin, LOW);
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
steps++;
}
}
}