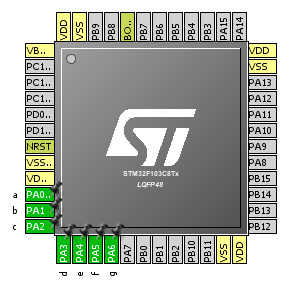
راهاندازی سونسگمنت توسط میکروکنترلر STM32F103C8
همه مقالات ->
همه مقالات 5490
2 کاربر آکادمی پارتینه
دراین آموزش نحوهی راهاندازی نمایشگر توسط میکروکنترلر STM32 با استفاده از کامپایلر keil ورژن mdk5 و کتابخانهی HAL مورد بررسی قرارگرفته است. کدنویسی و تنظیمات اولیه رجیسترها توسط نرمافزار کمکی STM32CubeMX انجام شده است. این نرمافزار که به اختصار به آن CubeMX -کیوب ام ایکس- نیز میگویند، به جهت سادهترکردن و سرعت بخشیدن به برنامه نویسی میکروکنترلرهای STM32 ایجاد شده است. ایجاد پروژه و راهاندازی واحدهای مختلف میکروکنترلرهای STM32 به صورت گرافیکی از جمله مهمترین وظایف این نرمافزار است. اگرچه کارکردهای دیگری چون تخمین میزان مصرف توان میکروکنترلر را نیز دارد.
بررسی ساختار سونسگمنت
یک سونسگمنت متشکل از هفت LED برای نمایش اعداد بین 0 تا 9 است. به منظور کاهش اتصالات LEDهای داخلی سونسگمنت کلیهی پایههای آند یا کاتد آنها به هم وصل میشوند. بنابراین سونسگمنت ها در دو نوع مختلف عرضه میشوند. به سون سگمنت های که پایه کاتدLED های داخلی به هم وصل هستند، سون سگمنت کاتد مشترک میگویند و به سونسگمنتهای که پایه آند LED های داخلی به هم وصل هستند، سون سگمنت آند مشترک میگویند.