انکودر افزایشی چیست؟
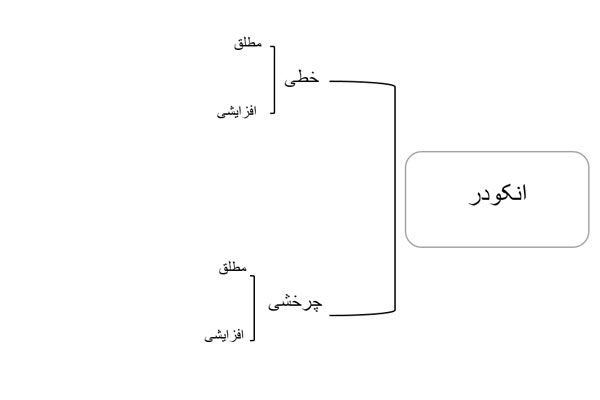
انکودر یا رمز گذار افزایشی یک وسیله الکترومکانیکی است که هم به صورت خطی (linear) و هم به صورت چرخشی (rotary) وجود دارد. اینکودرهای (رمزگذار) افزایشی تقریباً بلافاصله تغییرات موقعیت را گزارش می کنند، که به آنها این امکان را می دهد تا حرکت مکانیزم های با سرعت بالا را در زمان واقعی کنترل کنند. به همین دلیل، رمزگذارهای افزایشی معمولاً در برنامه هایی که به اندازه گیری و کنترل دقیق موقعیت و سرعت نیاز دارند، استفاده می شوند.
تفاوت انکودر مطلق (absolute) و انکودر افزایشی (incremental)
برخلاف انکودر مطلق، انکودر افزایشی موقعیت مطلق را نشان نمی دهد؛ بلکه فقط تغییرات موقعیت را گزارش می دهد و برای هر تغییر موقعیت گزارش شده، جهت حرکت را گزارش می دهد. در نتیجه، برای تعیین موقعیت مطلق در هر لحظه خاص، لازم است سیگنال های انکودر را به یک رابط انکودرافزایشی ارسال کنید، که به نوبه خود موقعیت مطلوب انکودر را ردیابی و گزارش می کند.
سیگنال های انکودر های افزایشی
دقت این نوع از انکودر ها به پالس است و تا زمانی که انکودر در حال حرکت است در خروجی پالس و سیگنال داریم. برای اندازه گیری سرعت و موقعیت باید در کنترلر تعداد این پالس ها شمارش شود.انکودر افزایشی به طور استاندارد دارای سه سیگنال خروجی است: یک سیگنال A متشکل از n پالس در هر دور، یک سیگنال B همانند A با اختلاف فاز 90 درجه و یک سیگنال Z.
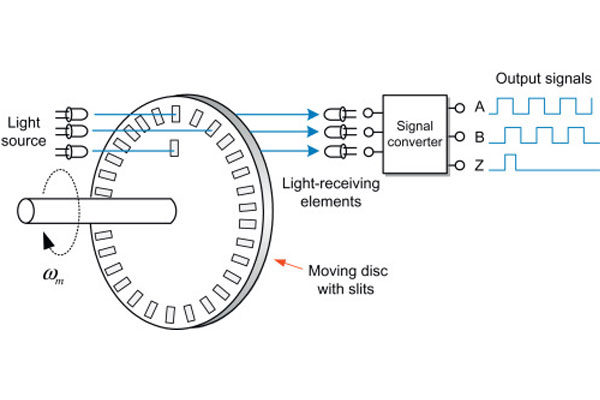
یک انکودرافزایشی مقدار مشخصی از پالس ها را در یک چرخش دیسک انکودر فراهم می کند و دارای دو سیگنال خروجی A و B است که هنگام جابجایی دستگاه پالس صادر می کنند. خروجی می تواند یک خط پالس (یک کانال(A یا دو خط پالس (دو کانال A و (Bباشد که برای تعیین جهت چرخش جابجا می شوند. سیگنال های A و B وقوع و جهت حرکت را نشان می دهند. با چرخش چرخ ما دو پالس خروجی داریم که با یکدیگر اختلاف فاز دارند و براساس آن می توان جهت چرخش را نیز مشخص نمود که به این فرایند مرحله بندی بین دو سیگنال ( quadrature) میگویند. بسیاری از انکودر های افزایشی دارای یک سیگنال خروجی اضافی هستند که به طور معمول با شاخص Z مشخص شده اند، که نشان می دهد رمزگذار در یک موقعیت مرجع خاص قرار دارد. همچنین، برخی از خروجی انکودر ها وضعیتی را ارائه می دهند که نشان دهنده شرایط خطای داخلی مانند خرابی بلبرینگ یا اشتباه در عملکرد سنسور است.
انکودر های خطی افزایشی
این نوع انکودرکه شامل طیف وسیعی از انکودرهای مغناطیسی خطی با سرعت بالا هستند که برای استفاده در محیط های سخت مانند کار با چوب، برش سنگ، اره، فلزکاری، منسوجات، بسته بندی، پردازش پلاستیک، سیستم های اتوماسیون و مونتاژ، برش لیزری، واتر جت، تولید تراشه الکترونیکی و...طراحی شده اند.

انکودر های چرخشی (روتاری)افزایشی
رمزگذار چرخشی افزایشی نوعی دستگاه الکترومکانیکی است که حرکت زاویه ای یا موقعیت شفت چرخشی را به کد آنالوگ یا دیجیتال تبدیل می کند که نشان دهنده آن حرکت یا موقعیت است. انکودر روتاری افزایشی می تواند برای برنامه های سرعت موتور و بازخورد موقعیت و کاربردهای صنعتی از سنگین تا سبک مورد استفاده قرار بگیرد. انکودر های افزایشی با تولید جریانی از پالس های باینری متناسب با چرخش موتور یا شفت محرک، سرعت، جهت و بازخورد موقعیت نسبی را فراهم می کنند. انکودر روتاری افزایشی فیدبک سرعت و فاصله ی زیاد را ارائه می دهد. این انکودر ساده تر از نوع دیگر انکودر روتاری مطلق است و دارای سنسورهای کمتری است، و به دلیل کم تر نشان دادن نقاط اشتباه، قیمت آن کمتر میشود. با این حال، یک رمزگذار افزایشی فقط می تواند اطلاعات تغییر حرکت را ارائه دهد، زیرا فقط در صورت چرخش شفت با انکودر می تواند خروجی های دورانی را نشان بدهد، بنابراین برای محاسبه حرکت به یک دستگاه کنترلر نیاز است.

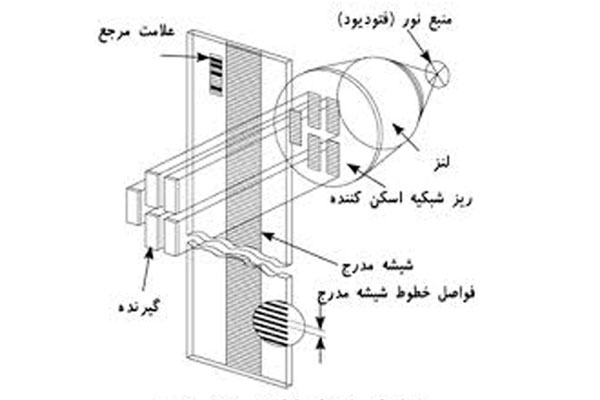
سنسوری که در یک روتاری انکودر افزایشی مورد استفاده قرار میگیرد هم میتواند مکانیکی باشد و هم نوری .
نوع مکانیکی آن به فرایندی به نام “debouncing" احتیاج دارد که روشی برای تمیزتر، نرمتر و سازگارتر بودن تولید در مقابل نوسان یا "bouncing" است. این نوع انکودرچرخشی معمولاً به عنوان پتانسیومتر دیجیتال در برخی تجهیزات و دستگاههای مصرفی مانند شماره گیری رادیو یا استریو اتومبیل یا حسگر حرکت در ماوس از نوع توپی استفاده می شود. اما به دلیل ماهیت مکانیکی سنسور آن ، دارای سرعتی محدود است. اما بهترین ویژگی آن کم هزینه بودن است و علی رغم داشتن تنها دو سنسور ، وضوح آن اصلاً تحت تأثیر قرار نمی گیرد.
انکودر های افزایشی ایی وجود دارند که در هر دور تا 10 هزارپالس یا بیشتر شمرده میشوند. انکودر از نوع نوری افزایشی برای برنامه هایی استفاده می شود که با سرعت بیشتری کار می کنند یا به دقت بالاتری نیاز دارند.
مزایای انکودر های افزایشی (incremental):
مناسب برای شمارش پالس های ساده یا مانیتورینگ فرکانس هایی همچون سرعت، جهت و موقعیت
مقرون و به صرفه و مکانیزم ساده نسبت به انکودر های مطلق
اندازه گیری مغناطیسی و نوری
Quadratureانکودر چیست ؟
وقتی ابزار حرکتی صنعتی علاوه بر سرعت به تشخیص جهت نیز نیاز دارند، انکودرهای افزایشی یک راه حل قابل اطمینان ارائه می دهند. انکودر چرخشی افزایشی با روش کوادراتور (quadrature ) میتواند مرحله بندی بین دو سیگنال را مشخص کند.
این گونه از انکودرها معمولا شامل چهار سیم می باشند به طوری که دو سیم از آنها مربوط به تغذیه انکودر یعنی Vcc و GND بوده و دوتای دیگر پالس هایی تولید می کنند که 90 درجه با یکدیگر اختلاف فاز داشته و با رمزگشایی این پالس ها می توان جهت چرخش، موقعیت، سرعت و حتی شتاب شفت موتوری که به آن متصل می باشد را تعیین کرد. یک انکودرافزایشی برای رمزگشایی سیگنال های خروجی A و B خود از یک quadrature استفاده می کند.
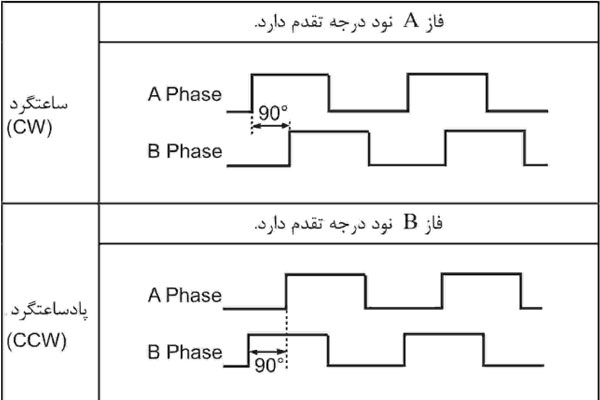
پالس های ساطع شده از خروجی های A و B رمزدار هستند، به این معنی که وقتی انکودرافزایشی با سرعت ثابت در حال حرکت است، شکل موج های A و B امواج مربعی هستند و اختلاف فاز 90 درجه بین A و B وجود دارد. یک کنترل کننده می تواند جهت حرکت را براساس رابطه فاز بین کانال های A و B تعیین کند. این مرحله بندی بین دو سیگنال را quadrature می نامند در هر زمان خاص، اختلاف فاز بین سیگنال های A و B بسته به جهت حرکت رمزگذار مثبت یا منفی خواهد بود. در مورد انکودر دوار، بسته به طراحی دستگاه، اختلاف فاز برای چرخش در جهت عقربه های ساعت +90 درجه و برای چرخش خلاف جهت عقربه ساعت -90 درجه است.
هنگامی که انکودر در جهت عقربه های ساعت در حال چرخش است سیگنال آن کانال A را پیشرو نشان می دهد، و هنگامی که رمزگذار کوادریتور خلاف جهت عقربه های ساعت بچرخد عکس آن اتفاق خواهد افتاد یعنی کانال B پیشرو میشود. اگر خروجی درB نسبت به A پیش فاز داشته باشد، یعنی انکودر در جهت چپ می چرخد.
به غیر از جهت، با تولید یک سیگنال دیگر معروف به "نشانگرشاخص" یا "کانالZ" می توان موقعیت را با یک رمزگذار کوادریتور نیز کنترل کرد. سیگنال Z، که یک بار در هر دور کامل از رمزگذار کوادرتور تولید می شود، اغلب برای تعیین موقعیت خاص در طول یک دور 360 درجه استفاده می شود.
فرکانس پالس ها در خروجی A یا B مستقیماً با سرعت رمزگذار متناسب است (سرعت تغییر موقعیت). فرکانس های بالاتر نشان دهنده حرکت سریع است ، در حالی که فرکانس های پایین سرعت کمتری را نشان می دهند. هنگامی که رمزگذار بی حرکت است، سیگنالهای ثابت و بدون تغییر از A و B خارج می شوند. در مورد انکودر چرخشی فرکانس ،نشان دهنده ی سرعت چرخش شفت انکودر است و در انکودر های خطی فرکانس، سرعت پیمایش خطی را نشان می دهد.
فرمول محاسبه فرکانس انکودر به صورت زیر است:
f (kHz) = (Cycle/rev) * (rev/sec) / 1000
همانطور که یک انکودر افزایشی می چرخد، دو خروجی موج مربع A و B تولید می کند. این سیگنال ها با هم یک خروجی کوادریتور انکودر افزایشی ایجاد می کنند. برای اکثر انکودر ها، این امواج مربعی A و B ، 90 درجه خارج از فاز هستند. با مشاهده حالات در حال تغییر خروجی های A و B می توان جهت انکودر را تعیین کرد. با این حال ، برای تعیین مسیری که رمزگذار طی کرده یا با چه سرعتی در حال چرخش است، اطلاعات بیشتری لازم است. برای محاسبه این اطلاعات، دانستن وضوح (resolution)رمزگذار مهم است. از وضوح میتوان به عنوان تعداد تکه های نامنظمی که انکودر به آن ها برای یک دور تقسیم شده است یاد کرد.
وضوح(Resolution)
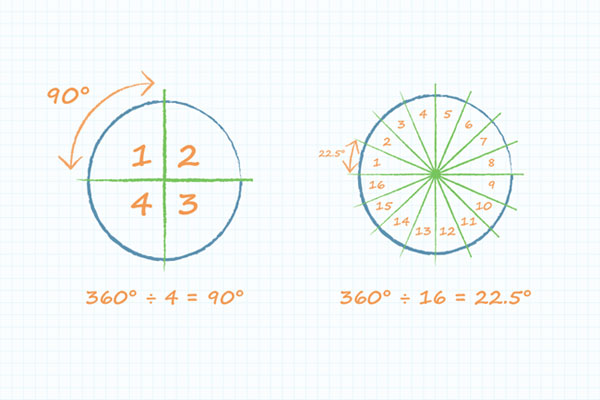
وضوح انکودر افزایشی اندازه گیری دقت اطلاعات موقعیتی است که تولید می کند. وضوح رمزگذار معمولا از نظر تعداد پالس های A) یا (Bدر واحد جابجایی یا معادل آن، تعداد چرخه های موج مربعی A) یا (B در واحد جابجایی مشخص می شود. در مورد انکودر های چرخشی، رزولوشن به عنوان تعداد پالس در دور (PPR) یا چرخه در دور (CPR) مشخص می شود، در حالی که رزولوشن انکودر خطی به طور معمول به عنوان تعداد پالس های صادر شده برای پیمایش یک مسافت خطی خاص مشخص می شود (مثلاً 1000 پالس در میلی متر). این در مقایسه با وضوح اندازه گیری انکودراست که کوچکترین تغییر موقعیتی است که انکودر می تواند تشخیص دهد. هر لبه سیگنال در A یا B تغییر موقعیت شناسایی شده را نشان میدهد. از آنجا که هر چرخه موج مربع در A) یا (Bشامل چهار لبه سیگنال است (افزایش A، افزایش B، سقوط A و سقوط B)، وضوح اندازه گیری رمزگذار برابر است با یک چهارم جابجایی ارائه شده توسط یک چرخه خروجی کامل A یا B به عنوان مثال، یک رمزگذار خطی 1000 پالس در میلی متر دارای وضوح اندازه گیری در هر چرخه 1 میلی متر / 1000 سیکل = 1 میکرومتر است ، بنابراین وضوح این رمزگذار 1 میکرومتر / 4 = 250 نانومتر است.
Pulses Per Revolution (PPR) پالس بر دور
PPR تعداد پالس های بالایی را که یک انکودر برای خروجی های پالس مربع A یا B خود طی یک دور خواهد داشت را توصیف میکند. هنگامی که وضوح مشخص شد، می توان از آن برای محاسبه تعداد درجات مکانیکی هر پالس و دوره استفاده کرد.
Counts Per Revolution (CPR) شمارش بر دور
به تعدادی از حالت های انکودرQuadrature اشاره دارد که بین دو خروجی A و B وجود دارد اشاره میکند. با تغیر هر دو خروجی A و B بین بالا و پایین 2 بیت اطلاعات وجود دارد که به عنوان4 بیت مجزا نشان داده شده است. اصطلاح رمز گشایی Quadrature روش استفاده از هر دو خروجی A و B را با هم برای شمارش هر تغیر حالت توصیف می کند. این نتیجه 4 برابر مقدار شمارشی است که برای هر پالس یا دوره وجود دارد. بنابراین، CPR یک رمزگذار PPR رمزگذار است که در 4 ضرب می شود. همچنین باید توجه داشت که برخی از تولیدکنندگان انکودراز مخفف CPR به معنای چرخه هر دور استفاده می کنند. Cycles per Revolution (به چرخه ها یا دوره های الکتریکی کامل در هر یک از خروجی های رمزگذار اطلاق می شود و معادل Pulses per Revolution است). با وجود اینکه برای هر دو تعداد در هر دور و چرخه در هر دوره از مخفف CPR استفاده میکنند، اما این دو در ضریب 4 متفاوت هستند، این امر به طور قابل فهم می تواند باعث ایجاد برخی از سردرگمی ها شود و باید مراقب باشید که نحوه تعریف وضوح رابه طور کامل متوجه شوید.
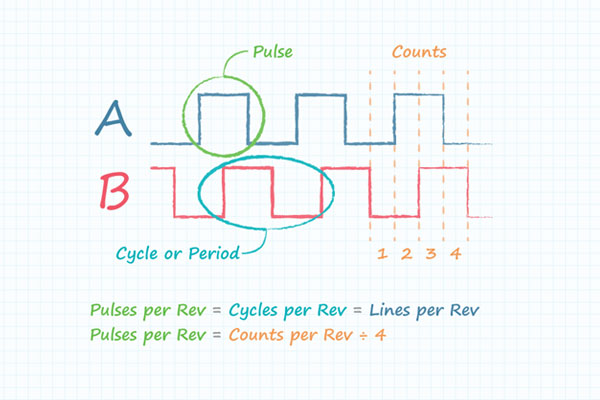
Lines Per Revolution (LPR) خطوط بر دوره
اصطلاح دیگری است که معادل PPR است. این خط به میله هایی گفته می شود که روی دیسک انکودر نوری چاپ می شوند. هر خط روی دیسک رمزگذار نوری نشان دهنده یک پالس پایین در خروجی است زیرا آنها رابطه یک به یک دارند.
از آنجا که وضوح در صنعت متفاوت تعریف می شود ، مهم است که هنگام مقایسه محصولات از سازندگان مختلف انکودر، اعداد را به همان فرمت در بیاورید. این کار بهتر است با مشاهده شکل موج یا نمودار زمان بندی بر روی صفحه داده و در صورت امکان محاسبه عرض پالس بر حسب درجه و یا دمای کمانی انجام شود.
استفاده ها و برنامه های کاربردی انکودر های افزایشی (Incremental)
یک رمزگذار افزایشی به گونه ای طراحی شده است که متنوع و قابل تنظیم باشد تا متناسب با کاربردهای متنوعی باشد. سه دسته گسترده از برنامه های مبتنی بر محیط زیست عبارتند از:
- وظیفه سنگین: محیطی طاقت فرسا با احتمال زیاد آلاینده ها و رطوبت، درجه حرارت، شوک و لرزش بالاتر همانطور که در کارخانه های کاغذ، فولاد و چوب دیده می شود.
- وظیفه صنعتی: محیط کارخانه عمومی که به درجه بندی استاندارد IP، شوک متوسط، لرزش و مشخصات دما نیاز دارد همانطور که در مواد غذایی و آشامیدنی، منسوجات، کارخانه های اتوماسیون کارخانه دیده می شود.
- Light Duty / Servo: محیط کنترل شده با دقت و درجه حرارت بالا از جمله رباتیک، الکترونیک و نیمه هادی ها.
علی دنبال کردن