انکودر چیست؟
به احتمال زیاد شاید این سوال هم برای شما پیش آمده باشد که انکودر چیست؟ ترجمه فارسی انکودر، رمزگذار است. علت این نامگذاری این است که انکودر (encoder) یک ابزار سنجش (سنسور) است که حرکت را رمزگذاری میکند و از حالات مکانیکی (motion) دستگاه برای ما سیگنال های الکتریکی ارسال می کند و آن ها را رمزگذاری میکند و به صورت کدهای دیجیتال در می آورد تا بتوانیم بعد از آن با اتصال انکودر به یک دستگاه رمزخوان مانند PLC، مقدار حرکت ثبت شده توسط انکودر را مشاهده کنیم. انکودر یک نوع سنسور حرکت است و علت اصلی به کاربردن انکودر در صنایع مختلف گرفتن فیدبک (feedback) از محیط است و با استفاده از آن میتوان یک سیستم حلقه بسته (close loop) ایجاد کرد.در هنگام استفاده از انکودر ها، انتخاب مدل مناسب برای موفقیت بسیارمهم است. انتخاب انکودر مناسب با درک نقش انکودر در سیستم شروع می شود. در این مطلب با ما همراه باشید تا با انکودر ها اشنا بشویم و نقش آن ها را درک کنیم و برای مشاهدهی انواع انکودر و مقایسه ی قیمت های آن ها و خرید انکودر به فروشگاه اینترنتی پارتینه مراجعه کنید.

انواع انکودر
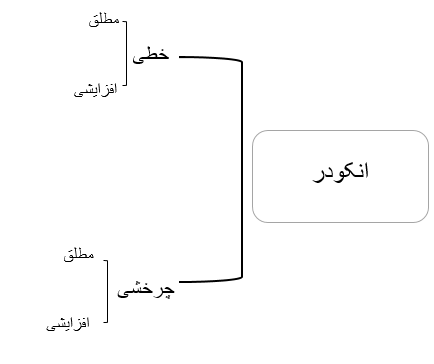
انکودرها از جهات 1-ظاهر 2-نوع خروجی سیگنال 3-نوع عملکرد 4-ساختار داخلی به دسته بندی های مختلفی تقسیم می شوند:
-
انواع انکودر ازلحاظ نوع عملکرد و ظاهر
-
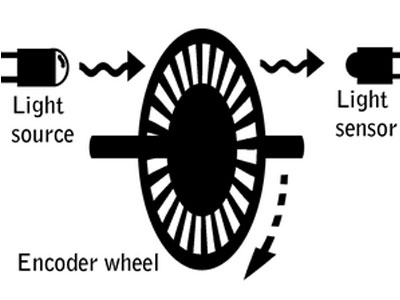
انکودر چرخشی ( Rotary encoder): انکودر دوار که به شافت انکودر (Shaft encoder) نیز معروف است، در واقع یک تجهیز الکترومکانیکی که موقعیت یا حرکت زاویه ای یک شافت یا یک محور را به یک کد آنالوگ یا دیجیتال تبدیل می کند. این نوع انکودر به طور معمول از یک یا دو جفت LED فرستنده و گیرنده و یک دیسک مدرج (سیاه و سفید یا جای خالی و جای پر) استفاده می شود. دیسک مدرج مابین سنسورهای فرستنده و گیرنده قرار دارد و این مجموعه بر روی محور چرخان دستگاه مستقر است. هنگام چرخش شافت دیسک مدرج همراه با شافت می چرخد و سنسورهای فرستنده و گیرنده ثابت می مانند. به این ترتیب سیگنالی که از سمت فرستنده به گیرنده ارسال می شود توسط چرخش دیسک به طور متوالی قطع و وصل می شود. به این صورت ما در خروجی گیرنده یک قطار از پالس های متوالی صفر و یک منطقی خواهیم داشت. این پالس ها همان کدهایی هستند که انکودر تولید می کند و برای اینکه تبدیل به موقعیت و یا تعداد دوران شافت شود، به ورودی یک دیکودر داده می شود و طبق برنامه ای که به دیکودر داده شده است، این پالس ها به موقعیت تبدیل می شود. هر چه تعداد نقاط سیاه و سفید روی دیسک مدرج بیشتر باشد، تعداد این صفر و یک های منطقی در یک دوران ۳۶۰درجه بیشتر و در نتیجه دقت اندازه گیری بیشتر می شود. انکودر دوار به دو دسته ی شفت دار و هالو شفت تقسیم می شوند که خروجی آنها می تواند به شکلهای سوکتی و کابلی در بازار یافت شود.

-
انکودر خطی(linear encoder): (خط کش الکترونیکی) این نوع انکودر همانطور که از نامش پیداست، جهت اندازه گیری حرکت خطی استفاده می شود. از لحاظ ساختمانی در انواع نوری، مغناطیسی و مقاومتی (در واقع نوعی پتانسیومتر است) ساخته می شود. انکودر خطی مدل نوری دارای خروجی دیجیتال و انکودر خطی مدل مغناطیسی و مقاومتی دارای خروجی آنالوگ است. از این انکودرها برای مدارات اتوماسیون در دستگاه هایی مثل دستگاه پرس برای اندازه گیری میزان حرکت طولی پیستون جک و غلتک ها برای اندازه گیری میزان فاصله طولی بین توپی های غلتک استفاده می شود.

-
انواع انکودر از لحاظ نوع خروجی سیگنال و نوع عملکرد
- انکودر افزایشی (Incremental encoder): سیگنالهای افزایشی موقعیت خاصی را نشان نمی دهند، و تنها تغییر موقعیت را نمایش می دهند. تا زمانی که انکدر در حال حرکت است در خروجی پالس و سیگنال داریم و برای اندازه گیری سرعت و موقعیت باید در کنترلر تعداد این پالس ها شمارش شود، ولی اگر کنترلر بازنشانی شود (تغذیه آن قطع شده و دوباره روشن شود) موقعیت قبلی انکودر را فراموش کرده و دوباره باید با شمارش پالس های انکودر اطلاعات جدید را کسب کند. یکی از معایب انکودر های افزایشی همین مورد می باشد که نمیتوان متوجه موقعیت قبلی و واقعی انکودر شد که این امر باعث ارزان قیمت بودن این مدل از انکودر ها شده است.کاربرد بیشتر این انکودر ها در آسانسور، موتور گیربکس و صنایع است. دقت این انکودر ها به پالس است.
مزایای انکودر های incremental
- مناسب برای شمارش پالس های ساده یا مانیتورینگ فرکانس هایی همچون سرعت، جهت و موقعیت
- مقرون و به صرفه و مکانیزم ساده نسبت به انکودر های مطلق
- اندازه گیری مغناطیسی
- انکودر های INCREMENTAL ( افزایشی) دارای رزولوشن 50.000 PPR)PULSE PER REVOLUTION)
- انکودر مطلق (Absolute encoder): انکودرهای مطلق به این معناست که در هر نقطه و موقعیت که باشد سیگنالی که در خروجی برای کنترلر ارسال میکند بیانگر همان مکان می باشد، در واقع انکودر های مطلق یک تعداد عدد یونیک برای هر زاویه از انکدر دارند که با قرار گیری در آن نقطه پالس و کد آن در خروجی ظاهر میشود. این انکدر ها به این دلیل که به تراز دوباره نیاز ندارند نسبت به انکودر های افزایشی گرانتر بوده و پس از هربار بازنشانی کنترلر موقعیت شفت انکودر فراموش نمی شود.
مزایای انکودر های absolute
- حفظ و به یادآوری موقعیت بعد از خاموشی دستگاه و تداوم مانیتورینگ موقعیت
- امکان تعیین موقعیت ماشین و امکان ذخیره سازی دیتا الکترونیک
- امکان استفاده از گزینه های چند گانه مانند: analog ,Ethernet ,fieldbus ,parallel ,serial
- استفاده از اندازه گیری نوری و مغناطیسی
- انکودر های مطلق دارای رزولوشن 16 بیت و یا 65.536 پالس در هر چرخش دارند (PPR)
-
انواع انکودر از لحاظ نوع عملکرد انکودر
- انکودر نسبی: به این صورت که یک گیرنده و فرستنده مادون قرمز در دو طرف چرخ شیاردار قرار می گیرد. در این نوع از انکودرها صرفا موقعیت نسبی جسم چرخنده نسبت به موقعیت اولیه اندازه گیری می شود و نمی توان جهت چرخش را مشخص کرد. به این نکته باید توجه کردکه هرچه تعداد شیارها بیشتر باشد دقت انکودر نیز بیشتر است.
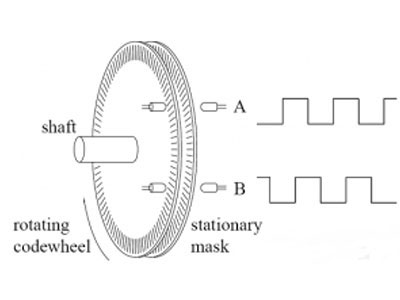
- انکودر افزایشی: در این نوع انکودرها از دو فرستنده و گیرنده مادون قرمز در دو طرف چرخ شیاردار با فاصله مشخص استفاده می شود بنابراین با چرخش چرخ ما دو پالس خروجی داریم که با یکدیگر اختلاف فاز دارند و براساس آن می توان جهت چرخش را نیز مشخص نمود. به طور مثال اگر از این انکودر در رباتی استفاده شده باشد و لحظه ای برق قطع شود، پس از اتصال دوباره برق ربات باید از نقطه صفر دوباره شروع به کار کند.
انکودر incremental مقدار مشخصی از پالس را در یک چرخش انکودر ایجاد مینماید. این خروجی می تواند یک خط از پالس های (Channel A) و یا دو خط از پالس ها (channel A , channel B) باشند که آف ست برای تعیین چرخش میباشند. این مرحله بندی بین دو سیگنال را quadrature می نامند. برای رمز گشایی پالس های یک انکودر(quadrature encoder) می توان از آی سی های آماده برای این منظور استفاده کرد، این آی سی ها خروجی انکودر افزایشی را به یک پالس قابل شمارش و یک خروجی برای تعیین جهت تبدیل می کنند.
quadrature در انکودرها معمولا شامل چهار سیم می باشند به طوری که دو سیم از آنها مربوط به تغذیه انکودر یعنی Vcc و GND بوده و دوتای دیگر پالس هایی تولید می کنند که 90 درجه با یکدیگر اختلاف فاز داشته و با رمزگشایی این پالس ها می توان جهت چرخش، موقعیت، سرعت و حتی شتاب شفت موتوری که به آن متصل می باشد را تعیین کرد. برای تعیین جهت چرخش در انکودر افزایشی، دو ردیف شیار روی صفحه دایره ای شکل تعبیه می شود که این دو ردیف نسبت به هم ۹۰ درجه اختلاف فاز دارند (فازهای A و B)اگر خروجی در A نسبت به B پیش فاز داشته باشد، یعنی انکودر در جهت چپ می چرخد.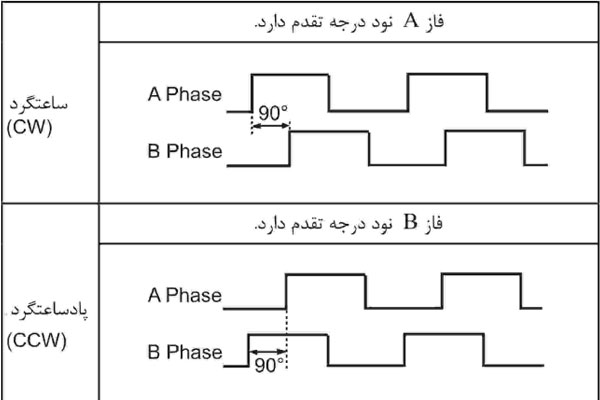
در یک ردیف، فقط یک شیار وجود دارد که به آن فاز Z می گویند. در هر دور یک پالس می دهد که نقطه صفر را مشخص می کند. با استفاده از PLC یا آی سی 4017 می توان خروجی را روی صفحه نمایش نشان داد. انکودرهای افزایشی می توانند دارای ۱ تا ۶ سیگنال خروجی باشند. که آن ها را معمولاA Bو Z می نامند. چرخش انکودر موجب تولید پالس A و چرخش محور (شفت) موتور موجب تولید پالس B می شود. از پالس Z نیز به طور معمول به عنوان یک نقطه مرجع دقیق استفاده می شود.
در برخی از انکودرهای افزایشی از پالس های معکوس سه پالس بالا نیز تحت عناوین ′A و ′B و ′C استفاده می شود. سیستم های کنترلی از انطباق پالس های معکوس و اصلی جهت اطمینان از عدم وجود خطا در حین انتقال بهره می گیرند. به پالس های معکوس، پالس دیفرانسیل هم گفته می شود.
در انکودرهای افزایشی 3 نوع پالس سیگنال وجود دارد که عبارتند از :3 پالس(ABZ)، 6پالس('ABZ A'B'Z)و 9 پالس("ABZ A'B'Z' A"B"Z)
- انکودر مطلق: در انکودرهای مطلق از یک صفحه شفاف استفاده می شود که بخش های خاصی از آن سیاه شده اند و از چندین فرستنده گیرنده (به طور مثال 8 جفت) استفاده می شود. در هر لحظه تعدادی از این گیرنده ها صفر و برخی یک را نشان می دهد، بدین ترتیب یک عدد باینری می دهد که زاویه بین صفر تا 360 درجه می توان محاسبه کرد. پس این نوع انکودر علاوه بر میزان جابجایی، موقعیت را نیز به شما می دهد. به طور مثال اگر از این انکودر در رباتی استفاده شده یاشد و لحظه ای برق قطع شود ،پس از اتصال دوباره برق نیازی نیست که ربات شما از نقطه صفر دوباره شروع به کار کند.
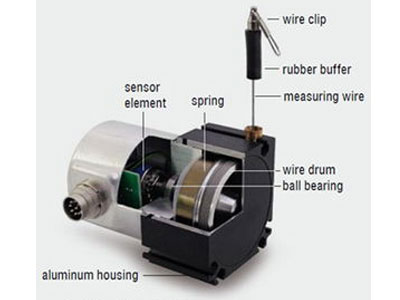
- انکودر سیمی: اساس کار این انکودر مانند انکودرهای نسبی می باشد با این تفاوت که بجای صفحه ی شیار دار از نوار یا (Tape) استفاده می شود. جرثقیل ها پرکاربردترین مکان برای استفاده از این سری از انکودرها هستند.
-
انواع انکودر از لحاظ ساختار داخلی انکودر
انکودرها از انواع مختلف فن آوری برای ایجاد سیگنال استفاده می کنند، از جمله: مکانیکی، مغناطیسی، مقاومت و نوری و اپتیکال که رایج ترین فناوری ها می باشند.از آن به عنوان فیدبک استفاده کنیم و دستگاه را کنترل کنیم
نوری: انکودرهای نوری، دقیق ترین نوع انکودرها هستند. وقتی یک انکودر نوری را انتخاب می کنیم. خیلی مهم است که انکودر مذکور حفاظت های اضافی برای جلوگیری از آلودگی ناشی از گرد و غبار ، لرزش و سایر شرایط رایج صنعتی را داشته باشد.
مغناطیسی: انکودرهای مغناطیسی با وجود اینکه از انکودرهای نوری مقاوم ترند و اغلب در محیط های در معرض آلودگی، بخار، لرزش و سایر انواع تداخل های محیطی استفاده می شوند ولی قدرت تفکیک(Resolution) یا دقت انکودرهای نوری بالاتر می باشد.
خازنی: انکودرهای خازنی نسبت به دو مدل قبلی در دنیای صنعت تازه وارد محسوب می شوند. انکودرهای خازنی از نظر نیرومندی مانند مدل های مغناطیسی هستند ولی قدرت تفکیک پذیری انکودر های نوری از انکودرهای خازنی بالاتر است. البته انکودرهای خازنی بدون توجه به نوع تکنولوژی مورد استفاده قابلیت تشخیص حرکت و تبدیل آن به سیگنال های استاندارد رایج در صنعت را دارا هستند.
انکودرهای چرخدار: انکودرهای چرخدار که با نامهای دیگری چون انکودر کالسکهای و ویل انکودر (wheel encoder) شناخته میشوند، بسته به محلی که مورد استفاده قرار میگیرند، میتوانند دارای یک یا دو چرخ باشند. کاربرد این انکودرها اندازه گیری طول یا سرعت هدفی است که به طور پیوسته در حال حرکت است. به طور نمونه این انکودرها در اندازهگیری طول موادی نظیر کاغذ، پارچه، پلاستیک و … در محیطهایی نظیر خطوط تولید است.

در هنگام خرید انکودر چرخدار این پارامترها را در نظر بگیرید: وزن انکودر، ولتاژ تغذیه، ابعاد انکودر، دقت اندازه گیری، جنس و شکل چرخ ها، ضد تکانه و لرزش بودن، داشتن قابلیت برنامه ریزی.
ولتاژ خروجی انکودر
ولتاژ خروجی انکودرها به دو صورت هستند که یا به صورت 5 ولت می باشند که در واقع TTL محسوب می شوند و یا 24 ولت هستند که HTL محسوب می گردند یا به عنوان منبع تغذیه نیز می توان از آنها استفاده کرد.
کاربرد انکودرها
انکودر ها معمولا در سیستم های اتوماسیون و کنترلی در قسمتی نصب می شوند که بتوانند از خروجی فیدبک را برای کنترلر ارسال کنند و پارارمترهای زیر را مشخص کند:
اندازه گیری سرعت (Speed Measurement)
اندازه گیری موقعیت (Position Measurement)
اندازه گیری زاویه (Angel Measurement)
اندازه گیری جهت حرکت شفت (Direction Detection )
شمارش(counts)
ماشین های CNC
ماشین های چاپ
در انواع الکتروموتور ها مثل: سروو موتور ها و استپ موتور
آسانسور
رباتهای صنعتی
ماشین های بسته بندی
انکودر (Encoder) قطعه ای است که می توان به کاربرد فراوان آن در صنعت و کارخانجات از جمله کارخانجات فولاد، دستگاه های نساجی، دستگاه های برش چوب و CNC، دستگاه های تولید کاشی و سرامیک و کارخانجات سیمان اشاره نمود. در واقع انکودر یکی از تجهیزات الکترومکانیکی است که در انواع ماشین آلات صنعتی استفاده می گردد. ماشین های برش، ماشین الات حمل و نقل، دستگاه های پرکنی و ربات ها بخشی از دستگاه هایی هستند که انکودرها در آن ها مورد استفاده قرار میگیرند.
مزایای انکودر
– بسیار قابل اعتماد و دقیق
– وضوح بالای انکودر
– الکترونیک یکپارچه
– فناوری نوری
– اندازه جمع و جور
معایب انکودر
– تداخل مغناطیسی یا رادیویی (انکودرهای مغناطیسی)
– تداخل منبع نور مستقیم (انکودرهای نوری)
– در معرض آلودگی هایی مثل خاک، روغن و گرد و غبار که قرار میگیرد باعث بروز مشکل در عملکرد آن میشود
به طور خلاصه جهت انتخاب یک انکودر به چه نکاتی باید توجه کرد و معیارهای مهم انتخاب یک انکودر چیست؟
1- درجه حفاظت یا همان ip (ip54 ،ip60 ،ip65 ،ip67) IP Rating (استاندارد جهانی مربوط به توانایی یک محصول برای مقاومت در برابر نفوذ مایع و گرد و غبار )
2- قابلیت تنظیم درجه پالس از 90 تا 180 درجه
3- تحمل رنج دما جهت کارکرد در محیط های مختلف از °40- تا °100
4- دقت در سرعت بالای چرخش (rpm)
5- استاندارهای اروپایی و امریکایی از قبیل (ul,vde,CE,CSA)
6- ویبریشن پروف (VIBRATION PROOF) یا شوکهای الکتریکی درمحی
معیار های مهم انتخاب انکودر
خروجی
وضوح مورد نظر (CPR)
سر و صدا و طول کابل
کانال شاخص