سروو موتور چیست؟
سروو موتورها الکترو موتورهای مستقلی از یک مکانیسم حلقه بسته هستند که حرکت چرخشی دور یک شفت دارند. سرو موتور یک موتور مکانیکی است که می توان آن را طوری به کار برد که بازو یا چرخی را که متصل به شفت آن است در جهت و اندازه دلخواه با سرعتی که مد نظر است جا به جا کند. سرو موتورها به دلیل داشتن اینرسی یا لختی پایین (مقاومت کم در برابر تغییر سرعت یا تغیر جهت جسم)، تغییر سرعت را سریعا میپذیرند. برای خرید سروو موتور صنعتی آشنایی با مفهوم سرو موتور بسیار کمک کننده است.
هرجا که صحبت از اهمیتِ دقت و سرعت در دستگاههای پیشرفتهی امروزی است، نام سروو موتور به وضوح قابل مشاهده است. امروزه نقش سرو موتورها در کنترل موقعیت به قدری حائز اهمیت شده که انجام دقیق این امور بدون آنها تقریبا غیر قابل تصور است.
پیش از معرفی سروو موتور و پرداختن به کارایی آن، نیاز است با مفهوم "موتور" بیشتر آشنا شویم؛ موتور الکتریکی وسیلهای است که انرژی الکتریکی را به انرژی مکانیکی تبدیل میکند. بیشتر موتورهای الکتریکی برای تولید نیرو از تعامل بین میدانهای مغناطیسی و جریان درون رساناها استفاده میکنند.
و اما سروو موتور به چه معناست؟ سروو موتور از دو کلمه سروو (Servo) به معنای فرمان یار و موتور (Motor) به معنای محرک تشکیل شده است؛ بنابراین سروو موتور به معنای موتور/محرک فرمان یار یا خود تنظیم است.
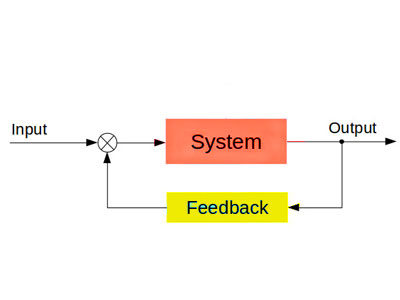
***اگر مقدار خروجی یک سیستم بر ورودی آن موثر نباشد، آن سیستم را حلقه باز مینامیم و برعکس، اگر خروجی سیستم بر ورودی آن تأثیرگذار باشد، به آن سیستم حلقه بسته میگوییم. این تأثیر توسط سنسور که وظیقهی فیدبک موقعیت را دارد، بر روی ورودی گذاشته میشود. شکل زیر یک مکانیسم حلقه بسته (close loop) را نشان میدهد.
از جمله وظایف ضروری سروو موتور و مدارات الکتریکی آن، افزایش دقت در مواردی همچون، کنترل زاویه، کنترل شتاب، کنترل سرعت و موقعیت دهی دقیق است. وجه تمایز سروو موتور و یک موتور عادی در داشتن سنسور برای انتقال فیدبک موقعیت است تا کنترل سرعت به نحو احسن انجام گیرد.
سیستم کنترلی فیدبک الکتریکی، برای کار به انرژی الکتریکی تکیه میکند. برای چنین کنترلی، مشخصههایی چون: پاسخ سریع، دقت بالا، کنترل بدون مراقبت و کارکرد از راه دور مورد نیاز است. ابزار چنین کنترلی وسیلهی آشکارسازی خطا، تقویت کننده، وسیله تصحیح خطا هستند.
هر عنـصر نقش مهمی در هماهنگ کردن کمیت مرجع با کمیت کنترل شده ایفا میکند. هنــگامی که کمیـت تنظیم شده متفاوت از کمیت مرجع باشد، وسیله آشکارسازی خـطا، این خطا را تشخیص داده و آشکار میکند. سپس یک سیگنال خطا به تقویت کننده که وظیفه تصحیح قدرت را دارد، ارسال میکند. وسیله تصحیح خطا ، کمیت کنترل شده را به قدری که با کمیت مرجع هماهنگ شود، تغییر میدهد.
به موتورهایی که به سرعت به سیگنال خطا پاسخ میدهند و سریعا به بار شتاب میدهند سروو موتور گفته میشود . نسبت گشتاور به اینرسی (T/J) یک جنبه بسیار مهم یک سروو مـوتور است ، زیرا موتور با این فاکتور شتاب میگیرد. شفت خروجی این موتور قابلیت جابهجایی به موقعیت، سرعت و زاویهی خاصی را دارد که یک موتور عادی قادر به انجام آن نیست.
با ذکر یک مثال و با بیانی سادهتر میتوان این طور گفت: فرض کنید یک خط تولید بطری آب گازدار دارید، همانطور که میدانید؛ بطریها برای توزیع و رسیدن به دست مصرف کننده مراحلی را طی میکنند. برای مثال ابتدا داخل بطریها، از آب گازدار پر شده سپس درب آنها پلمپ شده و در مرحله بعد روی هر بطری برچسب مخصوص شرکت تولید کننده زده میشود. اینکه بطریها در چه نقطهای بایستند، با چه سرعتی و تا چه نقطهای رو به جلو حرکت کنند و زمان توقفشان در هر نقطه و همچنین زاویه حرکتشان و.. همه و همه توسط سروو موتور انجام میشود. اطلاعات محل قرار گیری دقیق بطریها، زاویه حرکت هر بطری و همچنین سرعت حرکت آنها توسط سنسور یا انکودر به کنترلر سروو موتور داده میشود.
تفاوت سرو موتور با یک موتور عادی
- دارا بودن فیدبک سرعت
- داشتن اینرسی کم
- قطر کم
- طول زیاد
- سرعت بالا
- کنترل موقعیت و سرعت زاویهای
حال میپردازیم به بررسی این سوال که آیا میتوان یک موتور معمولی را جایگزین یک سروو موتور کرد؟
اگر تنها تمایزی که بین سروو موتور و موتور معمولی قائل هستید، فیدبکدار بودن و قابلیت کنترل سرعت و موقعیت خروجی آن است، با تقریب خوبی میتوان این کار را انجام داد. اما نکتهی حائز اهمیت در این باب وجود اینرسی بالا و عدم شتابگیری سریع در موتورهای معمولی و بزرگ است که برای رفع این مشکلات، نیاز به تغییر در ساختار و اندازههای روتور، استاتور و سیمبندیهای آنهاست که تقریبا کاری غیرممکن و دور از ذهن است.
اجزای اصلی و همراه سروو موتور صنعتی
- کنترل کننده جریان
- تقویت کننده (درایور)
- موتور سروو
- شفت
- انکودر

موتور سرو، خود شامل روتور و استاتور است. با توجه به اینکه سروو موتورهای AC ممکن است برای کار کردن در حالت دائم یا موقت به کار گرفته شوند، استاتورها به شکل دو فاز (لحظهای) و سه فاز (دائمی) سیم پیچی میشوند. یکی از مشکلات اساسی موتورهای الکتریکی، اینرسی بالایی است که هم در راهاندازی و هم توقف دارند. این مشکل تأخیر زیادی در سیستم ایجاد میکند به نحوی که این موتورها در سیستمهای سریع غیرقابل استفاده میشوند. نسبت گشتاور به اینرسی فاکتور مهمی در سرو موتورهاست؛ زیرا با این نسبت شتاب میگیرد.
کارکرد اجزای اصلی سرو موتور به چه صورت است؟
درایور:
راه اندازی سروو موتور و کنترل پارامترهای خروجی آن (فیدبک)، نیازمند یک درایور است که هر سرو موتور، درایور مخصوص خود را دارد که به همراه آن عرضه میشود. از مهمترین وظایف سروو درایو میتوان موارد زیر را نام برد:
- دریافت فرمان از سیستم کنترلی
- تقویت سیگنال فرمان و ارسال به ورودی سرو موتور
- نمایش فیدبک خروجی
- کنترل سرعت و گشتاور موتور
کنترل کننده جریان و تقویت کننده:
کنترل کننده سروو یا کنترلر حرکت سروو، سیگنالهای کنترلی از جنس ولتاژ ضعیف (سرعت و..) را به تقویت کنندهی سروو ارسال میکند. تقویت کننده یا درایور، آن را تبدیل به ولتاژ قویتر کرده تا برای استفادهی موتور مناسب باشد و سپس به موتور ارسال میکند. پالسهای الکتریکی سنسور به تقویت کننده فرستاده میشوند و تقویت کننده از این دادهها برای کنترل سرعت روتور استفاده میکند. وظیفه کنترل کننده بستن حلقهی loop در این سیستم کنترلی است. پارامترهای موتور مثل گشتاور، سرعت یا مکان را میتوان از طریق تبادل داده با تقویت کننده سروو به طور سریع کنترل کرد.
برخی از تولید کنندگان ماژولهایی ارائه دادند که در آن تقویت کننده و کنترلر با هم ادغام شده و قطعات و سیمهای ارتباطی کمتر، برد و مدار کوچکتری موجود است.
انکودر:
انکودرها جزء جدایی ناپذیر سروو موتورها و یکی از برتریهای سروو موتورها نسبت به استپ موتورها هستند. به وسیلهی انکودر و فیدبک ارائه شده توسط آن، سروو موتورها حرکت خود را اصلاح میکنند. امروزه سرو موتورها از انکودرهای چرخشی مطلق یا افزایشی استفاده میکنند.
انواع سروو موتورها
تقسیم بندی سرو موتورها بر اساس موارد زیر انجام میگیرد:
-
نوع جریانی که موتور را تغذیه میکند (AC/DC)
نوع جریان اگر DC باشد، سرعت مستقیما با منبع ولتاژ ارتباط دارد و اگر AC باشد، به فرکانس ولتاژ اعمالی و تعداد قطبهای مغناطیسی وابسته است. موتورهای AC جریان بیشتری مصرف میکنند و پرکاربردتر هستند اما در دستگاههایی که نیازمند قدرت زیادی میباشند از سروو موتور DC استفاده میشود. سروو AC می تواند موج جریانهای بالاتر را کنترل کند و در ماشین آلات صنعتی استفاده میشود. سروو های DC برای موج جریانهای بالا طراحی نشدهاند و معمولاً برای کاربردهای کوچکتر مثل رباتیک و کوادکوپر و ... مناسب هستند.
مزایای سروو موتورهای DC
- پاسخ سریع دینامیکی برای تغییر سرعت
- کنترل آسان
- گشتاور بالا
- دقت و سرعت بالا
معایب سرو موتورهای DC
- نیاز به کموتاتور یا ذغال
- نیاز به تعمیر و نگهداری مکرر
در موتورهای AC در ساختار سروو موتور یک سنسور موقعیت موجود است که میتواند انکودر باشد که در هر صورت، خروجی که به صورت موقعیت است به ولتاژ تبدیل میشود و پس از تقویت به میزان مناسب از ورودی کم میشود. پرکاربردترین سنسور در سروو موتورها انکودر است.
مزایای سروو موتورهای AC
- طراحی ساده
- مقاوم در برابر ضربه
- قدرت بالاتر در مقایسه با موتورهای DC هماندازه
- عدم نیاز به تعمیر دائمی به دلیل عدم وجود جاروبک
- به دلیل عدم وجود عایق در اطراف آرمیچر، پخش گرما توسط آرمیچر به راحتی انجام میگیرد.
- به دلیل عدم وجود سیم پیچیهای عایقدار در اطراف آرمیچر، قطر آن میتوانـد برای کاهش اینرسی روتور بسیار کمتر شود که این امر به جلوگیری از Over Shout در مکـانیسم سـرو کمک میکند.
به طور کلی، سرو موتور بخشی از سرو درایو است که ممکن است یک موتور DC (Brushless) یا موتور سنکرون یا آسنکرون (AC) باشد. نقطه مشترک تمام سروو موتورها، مکانیابی دقیق روتور توسط سنسور است که این سنسور برای ثابت نگه داشتن زاویه و سرعت گشتاور برای رسیدن به مکان مقصد در کمترین زمان ممکن ، از روش ارسال فیدبک استفاده میکند.
-
چرخش روتور (سنکرون/آسنکرون)
دستهای از موتورهای الکتریکی برق متناوب (AC) هستند که روتور آنها با سرعتی ثابت میچرخد؛ به این معنی که با تغییر میزان بار الکتریکی، تغییری در سرعت روتور ایجاد نمیشود. در واقع این سرعت ثابت همان سرعت میدان مغناطیسی دوار حاصل از نوسان برق متناوب، در استاتور است.
سنکرون و آسنکرون در واقع سرعت گردش روتور را بر اساس فرکانس جریان و تعداد قطبها مشخص میکنند. این نوع گردش فقط در سروو موتورهای AC قابل مشاهده هستند. به این موتورها، موتورهای بدون جاروبک گفته میشود چون در آنها نیازی به تغذیهی روتور نیست؛ بنابراین مقرون به صرفه هستند. اگر روتور با سرعت یکسان همراه با میدان مغناطیسی استاتور بچرخد، سنکرون و اگر سرعت چرخش روتور پایینتر از میدان مغناطیسی استاتور باشد، آسنکرون نامیده میشود. در حالت سنکرون، روتور شامل یک آهنربای دائمی است و جریان توسط الکترومغناطیس جاری میشود. نکتهی حائز اهمیت این است که اگر میدان استاتور (stator) خالی از انرژی شود، روتور (rotor) هم از حرکت میایستد.
وقتی از یک سروو موتور AC صحبت میکنیم، منظور یک موتور سنکرون سه فاز است که توسط میدان مغناطیسی دائما در حال تحریک است. پس شما میتوانید از یک موتور کوچک Brushless ولی در عین حال قدرتمند استفاده کنید. سیم پیچی استاتور یک میدان مغناطیسی دورانی تولید میکند که سرعت چرخش و نیروی آن توسط کنترل کننده و تقویت کننده سیستم سروو کنترل میشود. به منظور موقعیت دهی سریع، تمام این موتورها باید اینرسی اولیهی کمی داشته باشند که این مسئله با ایجاد یک ساختار ضخیم به دست میآید.
-
نوع کموتاسیون (جاروبک دار/ بدون جاروبک)
کموتاتور یک حلقهی رسانای استوانهای لغزان شکافدار است که هر بخش از حلقه به انتهای هر یک از سیمپیچهای آرمیچر متصل است. اگر آرمیچر چند سیم پیچی داشته باشد، کموتاتور هم چند بخش خواهد داشت به طوری که هر بخش به یک بخش از سیم متصل باشد. در دو طرف حلقه کموتاتور دو جاروبک (Brush) یا ذغال وجود دارد که روی پایهی فنری سوار هستند و با چرخش کموتاتور با بخشهای آن تماس فیزیکی پیدا میکنند. با تماس هر بخش از کموتاتور با جاروبک، جریان سیم پیچ مرتبط با آن بخش برقرار میشود.
در کموتاتور، بازوی میلهای متصل به آرمیچر (در روتور) به دلیل گشتاور تولید شده توسط آرمیچر، با زاویه سیم پیچ تغییر میکند. زمانی که سیم پیچ نسبت به میدان مغناطیسی استاتور حالت عمودی دارد، گشتاوری تولید نمیشود؛ پس به همین دلیل است که موتورهای DC سیم پیچهای چندگانه دارند. در نتیجه آرمیچر به نیرو گرفتن ادامه میدهد حتی اگر یک سیم پیچ عمود بر میدان حرکت باشد.
-
نوع حرکت (دوار/ خطی)
حرکت عادی شفت سروو موتورها به صورت دورانی و چرخشی است. در سروو موتورهای خطی، حرکت دورانی سروو موتور توسط گیربکس به حرکت خطی تبدیل میشود.
کاربرد سروو موتور
- در پرینترهای سه بعدی
- در دستگاههای CNC
- کنترل هدایت رباتهای صنعتی
- در دستگاههای دوخت پیشرفته و صنایع ریسندگی
- کنترل زاویه چرخش در سولار پنلها، به نحوی که پنل رو به تابش نور خورشید قرار بگیرد.
- در باز و بسته کردن دربهای اتوماتیک در اماکن عمومی مثل بیمارستانها
- آنتنهای ردیاب ماهواره
- مسلسلهای ضد هوایی
- در نوار نقالهها: نوار نقاله در واحدهای صنعتی مورد استفاده قرار میگیرد. برای مثال پر کردن بطری که ابتدا توسط دستگاه پر شده و سپس به قسمت بسته بندی منتقل میشود. به دلیل اهمیت موقعیت دقیق بطریها و حرکت دقیق آنها از سروو موتورها استفاده میشود.
به طور کلی میتوان گفت در هر زمینه کاری که نیاز به دقت و سرعت بالاست، کاربرد سروو موتور قابل مشاهده است.
مشخصات فنی سروو موتور که هنگام خرید باید مورد توجه قرار گیرند
- اینرسی بار: محاسبه اینرسی اعمال شده به هر کدام از اجزا برای محاسبه اینرسی بار کل
- سرعت: سرعتی که شفت در آن می چرخد، با توجه به تعداد دور در دقیقه (RPM) تعریف میشود.
- شتابگیری
- گشتاور موثر: در صورت لزوم، نیروی اصطکاک برای هر عنصر محاسبه میشود و برای یک شفت موتور، به گشتاور اصطکاک تبدیل میشود. همچنین نیروی خارجی برای هر عنصر محاسبه میشود و به گشتاور خارجی شفت موتور تبدیل میشود. مقدار گشتاور بار کل برای شفت موتور محاسبه میشود.
- گشتاور لحظهای ماکسیمم: توجه کنید که حداکثر مقدار گشتاور برای هر قسمت راه اندازی (حداکثر گشتاور لحظه ای) کمتر از حداکثر گشتاور لحظهای موتور باشد.
- توان: توان سروو موتور حاصل ضرب گشتاور نامی و دور نامی است؛ در نتیجه سروو موتورهایی که دارای توان مساوی هستند اما دور نامی آنها کمتر است، دارای گشتاوری بالاتری هستند.
- قیمت: نکته قابل توجه این است که رنج قیمت سروو موتورها بر اساس گشتاور نامی آنهاست یعنی گشتاو ذکر شده روی سروو موتور.
- شرایط محیطی
- مشخصات منبع تغذیه
- اندازه فیزیکی: اندازه، جرم، ضریب اصطکاک و کلیه قسمتهایی که روی چرخش شفت سروو موتور موثر هستند.
نصب و راه اندازی سروو موتور
تمام سروو موتورها درایور سه فاز دارند. درایورهایی که با برق 220 ولت سه فاز کار میکنند، قابلیت این را دارند که با ورودی برق تک فاز، برق سه فاز 220 ولت تولید کنند؛ ولی 15 الی 20% افت گشتاور خواهند داشت. در مورد سروو موتورهای سه فاز 380 ولت، نمیتوان چنین رویهای داشت پس حتما باید از سه فاز 380 ولت استفاده کرد. اگر میتوانید برق سه فاز تأمین کنید، به دلیل عملکرد بهتر و افت گشتاور پایینتر، بهتر است از 380 استفاده کنید. نکته حائز اهمیت این است که در سرو موتورهای توان پایین و دور بالا معمولا ورودی 3 فاز کمتر مورد استفاده قرار میگیرد؛ برای مثال برای توانهای یک کیلو وات به بالا بهتر است از ورودی برق سه فاز 380 ولت استفاده کرد.
دمای محیط کاری سروو موتور 0 الی 40 درجه سانتیگراد است در صورتی که دمای موتور ممکن است در حین انجام کار به 90 درجه سانتیگراد هم برسد.
تفاوت سروو موتور و استپ موتور

علاوه بر شباهتهای زیادی که میان سروو موتور و استپر موتور مشهود است؛ تفاوتهایی نیز باهم دارند. از جمله این تفاوتها میتوان به تفاوت در سرعت، هزینه، گشتاور، شتاب و توان موجود در درایور اشاره کرد.
فرق استپر موتور و سروو موتور:
- گشتاور نوشته شده روی سروو موتور، گشتاور نامی آن است و سروو موتور میتواند با جریان کشیِ بیشتر، تا 1.5 الی 2 برابر آن گشتاور را به صورت لحظهای نیز تأمین کند اما گشتاور نامی نوشته شده روی استپ موتور، حداکثر گشتاوری است که میتواند داشته باشد. حداکثر گشتاور استپر موتور 250 کیلوگرم سانتی متر است.
- استپر موتور با بالا رفتن دورش با افت گشتاور مواجه میشود و حداکثر دور بهینهی آن 200 الی 300 دور بر دقیقه است (کارکرد مطلوب استپر موتور)؛ در صورتی که سرو موتور تا 3000 دور (حداکثر دور) میتواند با گشتاور نامی خود اعمال بار کند.
- تعداد قطب در استپ موتورها عددی بین 50-400 است در صورتی که این عدد در سروو موتورها 4-12 است.
- در استپر موتورها چرخش شفت بدون فیدبک ولی با دقت انجام میشود در صورتی که سرو موتور دارای فیدبک برای موقعیت دهی شفت است.
- بازده سروو موتورها در بازهی زمانی کوتاه بالاتر است.
- صدای کمتر سروو موتور نسبت به استپ موتور از جمله مزایای سرو موتور نسبت به استپر موتور است.
- نهایت سرعت استپر موتور 2000rpm است (حداکثر سرعت استپر موتور در حالت کلی) در حالی که سرو موتور قادر به حرکت با سرعت بیشتری است.
- از تفاوت میان استپ موتور و سروو موتور میتوان قیمت پایینتر استپ موتور نسبت به سرو موتور را نام برد که به این دلیل است که آهنرباهای به کار رفته در سروو موتور گرانتر هستند و استپ موتور به ندرت جعبه دنده دارد.
- استپ موتور در سرعتهای پایینتر دارای گشتاور بالاتر نسبت به سروو موتور با همان سایز است.
- ساختار سروو موتورها بسیار پیچیدهتر از استپر موتورهاست.