میزان تغییرات سرعت در یک پرینتر سه بعدی با پارامتری به نام Jerk انجام میشود. مفهوم Jerk به عنوان آهنگ تغییرات شتاب همان چیزی است که باعث لرزش پرینتر میشود. در واقع اختلاف سرعت بین دو حرکت است که از مشتق گیری شتاب بدست میآید.
دلیل نیاز به Jerk چیست و چه تاثیری بر حرکت پرینتر دارد؟
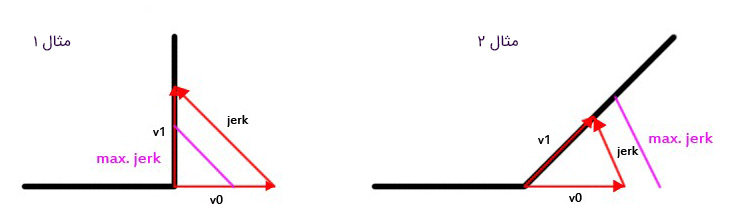
اولین پارامتری که Jerk بر آن تاثیر میگذارد سرعت شروع حرکت است. سرعت شروع حرکت 50٪ از میزان Jerkمجاز است. بنابراین اگرمقدار آن 20 باشد ، اولین حرکت با 10 سرعت میلی متر بر ثانیه شروع میشود. کار بعدی که Jerk انجام میدهد کنترل سرعت پیوستن به بخشهای متوالی است. در تصویر زیر دو مثال از عملکرد Jerk را مشاهده می کنید. Jerk تفاوت این دو سرعت است. درمثال 1 میزان Jerk بیش از حدمجاز تعریفشده برای آن است. در این حالت بخش برنامهریزی مسیر (path planner) مقدار سرعت را برای مطابق با حداکثر سرعت مجاز کاهش می دهد. در مثال 2 تغییر جهت کمتری انجام شده است. بنابراین Jerk در محدوده مجاز است وبخش برنامهریزی مسیر اجازه میدهد تا حرکت بدون کاهش سرعت انجام شود.
تنظیم میزان Jerk در فریمور مارلین (Marlin Firmware)
برای تنظیم مقدار Jerk وارد تب configuration .h فریمور مارلین شده و عبارت section motion را پیدا کنید. مقادیر مناسب را در این قسمت تعیین کنید.
#define DEFAULT_XJERK 10.0
#define DEFAULT_YJERK 10.0
#define DEFAULT_ZJERK 0.3
#define DEFAULT_EJERK 5.0
مقدار Jerk را افزایش دهید اگر میخواهید :
مدت زمان پرینت را کاهش دهید.
در پرینت کردن سطوح منحنی شکل گلوله گلولههای کوچک را روی سطح مشاهده میکنید.
هم چنین در صورت نیاز به موارد زیر مقدار Jerk را کاهش دهید :
لزرش کمتری روی بدنه پرینتر حس کنید.
به حرکات نرمتری دست پیدا کنید.
فیلامنت در هنگام تغییر جهت چسبندگی بهتری پیدا کند.
از ورود نویز جلوگیری شود.