انتخاب موتور مناسب برای کاربردهای مختلف بستگی به برخی از معیارهای طراحی از قبیل دقت موقعیت مکانی ، هزینه ، گشتاور و شتاب سیستم مورد نظردارد. به طور کلی موتورهایی مانند موتورهای DC، سروو و استپر موتورها در کاربردهای مختلف نیاز طراحان را برآورده کرده و جزء پراستفادهترین نوع موتورهای صنعتی و نیمه صنعتی به شمار میروند. بسیاری از افراد دچار این سوء تفاهم هستند که تفاوت زیادی بین موتور DC ، سروو موتور و استپر موتور وجود دارد. برای اطلاع از تفاوتهای این سه نوع موتور ، در این مقاله به بررسی تفاوت های مختصر بین این سه موتور پرداخته میشود.
برای انتخاب بین موتور DC ، سروو موتور و استپر موتور در یک طراحی باید به فاکتورهای متفاوت و اساسی از جمله هزینه ، سرعت، گشتاور ، شتاب و همچنین درایور موتور توجه کرد.
موتورهای DC
موتورهای DC جزو موتورهایی با کارکرد پيوسته يكنواخت (continuous running duty ) هستند که با اعمال تغذیه به آنها شروع به چرخش کرده و این چرخش تا زمانیکه تغذیه شوند ادامه مییابد
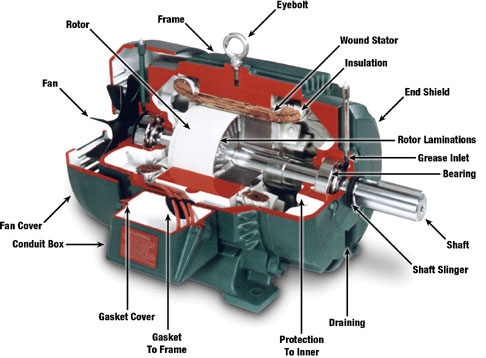
بیشتر موتورهای DC درسرعت بالا کار میکنند. به دلیل وجود این قابلیت از این نوع موتورها در رایانهها به عنوان خنککننده ، در صنایع خودروسازی برای تست تایرها ، در ساخت دربهای اتوماتیک، کوادکوپترها و ... استفاده میشوند. در شکل زیر نمای داخلی و اجزای سازنده ی یک موتور DC نشان داده شده است.
سرعت موتور DC را میتوان با استفاده از تکنیک مدولاسیون عرض پالس PWM)) کنترل کرد. مدولاسیون عرض پالس تکنیکی برای بدست آوردن ولتاژ خروجی قابل کنترل از ولتاژ ورودی ثابت و متغیر میباشد. هم چنین امکان کنترل گشتاور نیز با تغییر جریان وجود دارد.
سروو موتورها
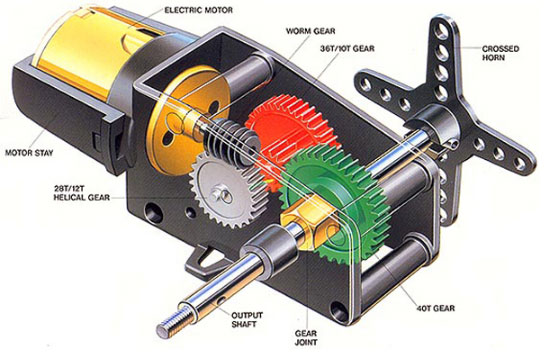
به طور کلی یک سروو موتور ادغام و ارتباط 4 بخش است : یک موتور DC ، یک مدار کنترلی ، یک مجموعه دنده و همچنین یک پتانسیومتر و سنسور تعیین موقعیت.
موقعیت سروو موتور را می توان با دقت بیشتری نسبت به سایر موتورهای معمولی DC کنترل کرد . در واقع در مکانیزم سروو موتور یک لوپ بستۀ کنترلی جهت گرفتن فیدیک از موقعیت شفت به کار می رود. این موتورها دارای سه سیم هستند: POWER ، GND و سیگنال کنترل
تغذیه این موتورها به طور پیوسته اعمال شده و توسط مدار کنترل، موتور سروو در موقعیت مکانی خاص قرار میگیرد. این نوع موتورهای DC به متظور استفاده در کارهایی دقیقتر که در آن موقعیت مکانی لازم است، طراحی شده اند. مانند حرکت دادن بازوی رباتیکی ، کنترل پدال قایق ، کنترل پای روبات در یک محدوده خاص و ... .
سروو موتورها بر اساس سیگنال کنترلی که دریافت میکنند میزان قدرت لازم را برای رسیدن شفت به نقطه ی مورد نظر اعمال میکنند. در این موتورها هم از مدولاسیون عرض پالس برای سیگنال کنترلی سروو موتور نیز استفاده میشود. اما در اینجا مدت زمان پالس مثبت، موقعیت شفت سروو موتور و تا حدودی سرعت آن را کنترل میکند.
افزایش طول پالس باعث می شود سروو موتور به صورت ساعتگرد و یک پالس کوتاه باعث چرخش سروو موتور در جهت پادساعتگرد میشود.
سيگنال كنترلي سروو موتور معمولاً هر 20 میلیثانیه يكبار اعمال شده و براي سروو موتور موقعيتي را كه بايد قرار بگيرد مشخص ميكند. حتی اگر نیروی خارجی بر روی شفت فشار وارد کند، در موقعيت تعيينشده باقي ميماند. بطور خلاصه یک اختلاف مهم بین پالس کنترلی سروو موتور در مقابل موتور DC وجود دارد و آن این است که در سروو موتور میزان Off بودن سیگنال در یک چرخهکاری (Duty Cycle) هیچ معنایی ندارد. مهم مدت زمان On بودن آن است که تعیین کننده موقعیت شفت موتور است .
استپر موتورها
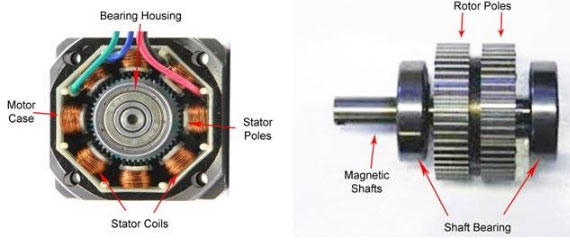
یک استپر موتور اساساً یک سروو موتور است که از یک روش متفاوت حرکتی استفاده میکند. در حالیکه که یک سروو موتور شامل یک موتور DC و مدار کنترل کننده است، استپر موتورها از مواد فرومغناطیسی با شکاف هوایی مشخص برای توصیف موقعیت استفاده میکنند. هر پالس فرستاده شده به موتور سبب حرکت محور موتور تا زاویهای معین شده که این زاویه ، زاویه استپینگ نامیده می شود.
عدم نیاز به فیدبک سنسورهای موقعیت یا سرعت برای کنترل موقعیت و یا سرعت موتور از مشخصات بارز استپر موتورها است. یک استپر موتور حتی در حالت بدون حرکت به شرط عبور جریان از سیم پیج گشتاور کامل خود را دارد.
استپر موتورها به دو دسته تقسیم می شوند: تک قطبی (Unipolar) و دو قطبی(Bipolar).
تفاوت استپر موتورهای تک قطبی و دو قطبی در ساختار سیمپیچی آنهاست. این تفاوت در ساختار عملکرد آنها را نیز متفاوت کرده است. در استپر موتورهای تک قطبی هر فاز دارای یک سیمپیچ است. برای تغییر جهت موتور نیز بایستی جهت جریان ورودی تغییر یابد. در این نوع استپر موتورها به دلیل استفاده از تمامی ظرفیت، در سیمپیچها گشتاور بیشتری تولید میشود. در استپر موتورهای دو قطبی هر سیمپیچ از دو هسته با یک سیم خروجی میانی تشکیل شده و در هر لحظه تنها یک هسته مورد استفاده قرار میگیرد. به طوری که هر کدام برای یک جهت چرخش موتور در نظر گرفته شده است. برای تغییر جهت چرخش موتور، در سیمبندی جهت جریان معکوس میگردد.
جوانب مثبت و منفی سروو موتور، استپر موتور و موتورDC
مزایا و معایب موتور DC ، سرو موتور و استپر موتور شامل موارد زیر است:
-
موتورهای DC جزو موتورهای سریع و پیوسته هستند که عمدتا برای هر چیزی که نیاز به چرخش با سرعت بالا دارند استفاده میشوند. برای مثال چرخ خودرو ، پنکه و ... . از معایب موتورهای DC میتوان به قابلیت اطمینان کم در سرعتهای پایین و بزرگ بودن ابعاد در قدرتهای بالا اشاره کرد.
-
سروو موتورها دارای چرخشی سریع و دقیق با گشتاور بالا در یک زاویه محدود هستند. همچنین به دلیل داشتن سیستم کنترل پیشرفته درایو، دارای عملکردی بدون لرزش هستند. به طور کلی یک جایگزین برای استپر موتورها با کارایی بالا اما تنظیمات پیچیدهتر به شمار میروند. این نوع موتورها به دلیل داشتن سیستم کنترلی پیشرفته برای پرینترهای سهبعدی و دستگاههای CNC و سایر دستگاههایی که کنترل موقعیت در آنها حائز اهمیت است، استفاده میشوند.
-
در استپر موتورها با توجه به تناسب پالس ورودی و فرکانس، رنج قابل توجهی از سرعت موتور قابل دسترسی است. هم چنین دارای حرکتی دقیق و تکرارپذیر بوده و به دلیل بدون ذغال بودن موتور قابلیت اطمینان و طول عمر بالاتری دارد. از معایب آنها میتوان به داشتن رزونانس در صورت عدم کنترل صحیح و عملکردی ضعیف در سرعت بالا اشاره کرد.